- Home
- Product Categories
- Sensors
- IMU 6 Degrees of Freedom - v4 with Bluetooth Capability

{kind=link}
IMU 6 Degrees of Freedom - v4 with Bluetooth Capability
Replacement: None. Although we do not have a direct replacement, the Ultimate IMU could work well as a replacement. This page is for reference only.
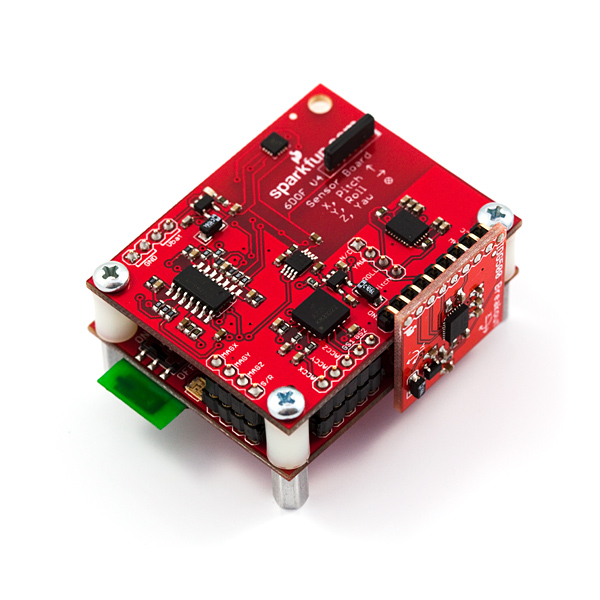
The 6DOF v4 Inertial Measurement Unit (IMU) is the latest Sparkfun IMU offering. The v4 provides 3 axes of acceleration data, 3 axes of gyroscopic data, and 3 axes of magnetic data. Each independent channel is user selectable, as is the sampling frequency. The device can also report in ASCII or binary format, and can work over a wireless Bluetooth**® **link or a wired TTL serial connection. Control is provided through an LPC2138 ARM7 processor with plenty of extra memory for custom code development. All code is written using the free WinARM development platform. With our available source code, you can be doing your own development in minutes!
For a wireless link, the 6DOF will communicate with any Bluetooth**® **device that supports the Serial-Port-Profile (SPP - most do!). However, because of the dense amount of data across the serial link we recommend the BlueDongle USB device below.
Having a hard time picking an IMU? Our Accelerometer, Gyro, and IMU Buying Guide might help!
**Note: **We've been encountering a lot of noise on the x-axis magnetometer when using the 6DOF over Bluetooth. If the output of this sensor is of vital importance, we really suggest using the IMU over a hard-wired interface, which will drastically diminsh the noise. Our engineers are aware of the issue and in the process of resolving it. Please contact our tech support team (techsupport at sparkfun dot com) if you have any questions.
Firmware:
- Input Voltage: 3.7V to 7VDC
- LPC2138 ARM7 Processor
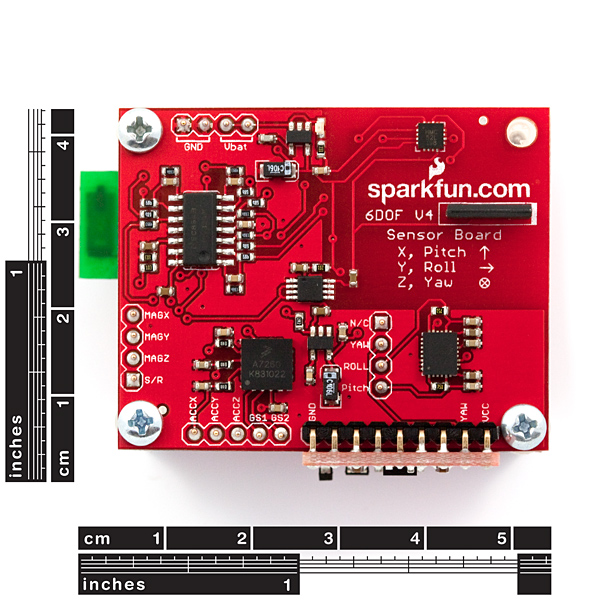
- Freescale MMA7260Q triple-axis accelerometer, settable to 1.5g, 2g, 4g or 6g sensitivity
- 2 Invensense IDG500 500 degree/second dual-axis gyros (total of 4 axis)
- Honeywell HMC1052L and HMC1051Z magnetic sensors
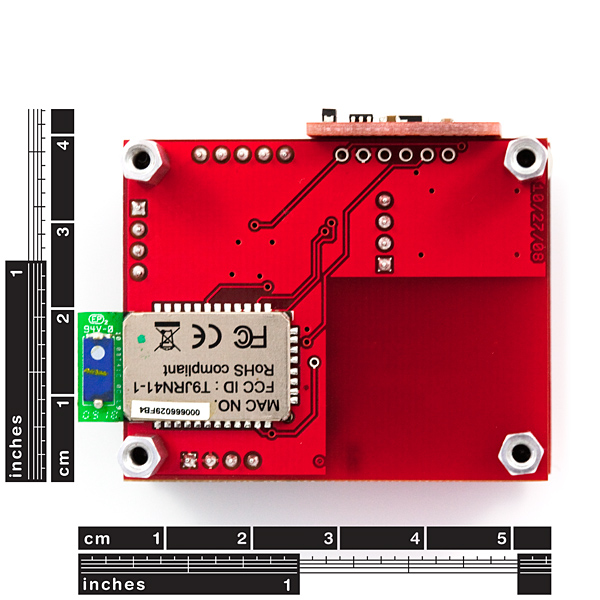
- Roving Networks Bluetooth Module
Tri-color status LED
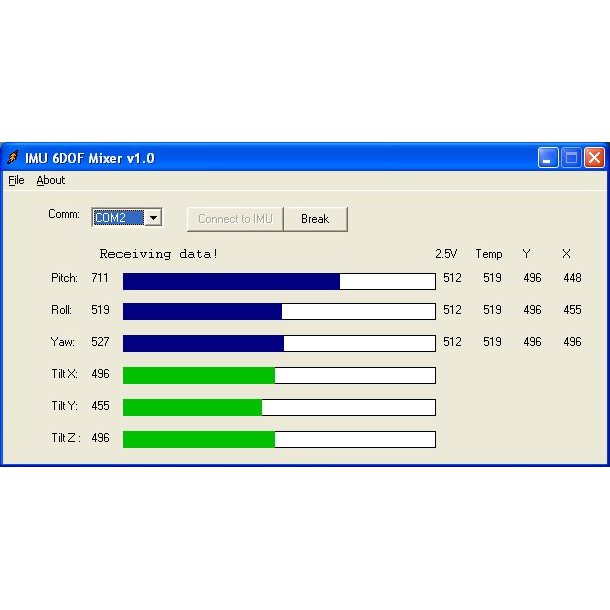
Board stack comes fully assembled as shown. All sensors are internally temperature compensated. All readings are available through any terminal program in either ASCII, binary format, or with the improved 6DOF v4 IMU Mixer demo application (source code also available). Power is supplied through a JST connector on the bottom board. See below for a connector.
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
No reviews yet.
Hi! Who has experience in how to reduce the effect of shaking the unit? I'd like to use it on an in-pipe ROV.
Thx,
Boris
Hi! Would you tell me how can I compile the given Visual Basic source code? I tried with Visual Studio 2008, but it failed. I tried to setup Visual Basic 6.0, but I could not install on my PCs (Vista and XP). Any help would be greatly appreciated.
Thx,
Boris
it's Visual Basic 6, not Visual Basic 2008
Please contact tech support directly at techsupport@sparkfun.com. Thanks.
Does anybody know how to configure "Programmers Notepad" with WinARM-20060606 (in the description's WinARM link) to compile my new firmware? (Actually, the provided v4 firmware only throws raw data to serial port. My firmware will use the quite decent onboard LPC2138 ARM7 processor to send an already filtered signal to my main microprocessor.)
After buying this product I sadly discovered that AD conversion is only 10-bit, the same poor resolution as any common microcontroller in the market. For example the current arduinoIMU features 12-bit ADC, it means 4 times more resolution than my new 6DOF
finally, what IDE should i use with WinARM? i haven't found something to use. thx
As usual, another board is full of questions about a potentially faulty product without any solutions or explanations forthcoming from the seller. We were considering ordering this device, but thanks to this board, we will not be ordering anything from Sparkfun.
Sparkfun -- answer the people's questions, or lose the business! It's time to change the paradigm of manufactures sitting smugly by in silence, collecting money for faulty product, while their boards fill up with the lamenting of customers who trusted them.
This board reminds me of the board for Sony Vegas Pro 9. You can tell when a product is a ripoff just by reading the boards.
Hi there. We'd be happy to answer any questions you might have. Drop us a line.
techsupport at sparkfun dot com
I'm having trouble reading magnetometer data over bluetooth. The signal to noise ratio I'm currently acquiring is awful. I can't really do any form of filtering to make the noise minimal. Like most people have suggested, maybe I should try turning off bluetooth and reading over serial. It seems pointless to ship a product that doesn't work out of the box especially since this item boasts about bluetooth connectivity.
If anyone can send me a few minutes worth of IMU data, [all 9 values (3mag, 3acc, 3gyro) and timer count (w/ freq.)] I'd appreciate it.
other than bluetooth module and gyro sensitivity diffrence , is there a difference this module and the combination of
https://www.sparkfun.com/commerce/product_info.php?products_id=9184
+ 2*
https://www.sparkfun.com/commerce/product_info.php?products_id=719
+
http://www.sparkfun.com/commerce/product_info.php?products_id=272
can i use the firmware provided here ?
what is the difference between compass, magnetometer and magnetic sensor ?
can any one suggest me a better IMU setup for autonomous quadrocopter around the same price tag ?
can anybody tell how i can calibrate this using 3dm gx1 , i have trying to do it but the readings are no where near to each other ..?
and which methods can be used to see whether this product gives the right readings ?
Hi. I bought a 6dof v4, and I connected to a gumstix overo fire device. I saw the configuration, but when I read the raw, all teh channels are actives, changing values. is it normal, even when I didnt move the IMU at all.
How can I interpret the data? Are there any perl and or excell spreadshet to convert the volt measures into geographic data
thanks in advance
daniel
The maximum Dimensions are as follows
length: 2.214 in. with the Bluetooth Module, 2.005 in. without the module
Width: 1.727 in. with the gyro, 1.610 in. without the gyro
Height: 1.090 in. with the gyro, 0.955 in. without the gyro
Weight: .0573 lbs
For the dimensions of most of our products I would recommend using the eagle files as they are pretty accurate.
Can anybody tell me exact dimension and weight of this, please?
Any idea if the Bluetooth noise problem has been solved? I was going to purchase this for a project but we need it to work cleanly with wireless.
-Sean
Hi,
Could anybody post some sample linux C code to read the imu data through serial cable. I'm just starting on this and any help would be greatly appreciated.
Thank you
Max
Hi! This works very well for such a price!
Thats why we ordered two more and then... :(
...we discovered that when transmitting datas, the Bluetooth was corrupting the magnetometer with large amplitude, low frequency noise. Its the same with all IMUs. This is too sad because perf are good when wired.
Has anyone encounterd the same problem? Solution please? =S
Btw be carefull with axis names(X and Y mag are inverted) and signs (corrections needed too). In the initial firmware this is not properly defined with respect to printed Yaw, Pitch and Roll axis.
Hi!
I've found the same problem as you Tibs. If I'm using the Bluetooth connection the magnetometer's data gets corrupted but if I'm using the serial cable everything is fine.
I sent an email to the tech support last week I asking for a solution but still waiting.
Hi there, just wondering whether a solution has been found to the issue with the Bluetooth corrupting the magnetometer?
Would a zigbee module cause the same type of corruption?
how about just turn off the bluetooth radio. Take a reading from the magnetic sensors, store it to eeprom and then turn back on the radio and read the accerlerometers and gyro.
I do not see the BlueDongle USB device below. Any advice? How necessary is this component?
As this product is out of stock, I can only backorder. According to the backorder rule, I will pay the money until the product is available. However, I want pay it first as we do not have enough funds to pay next year.