Gyroscope
{kind=link}
How to Select a Gyro
There are many specifications to consider when figuring out what type of gyro to use. Here are a few of the more important useful ones:
Range
The measurement range, or full-scale range, is the maximum angular velocity that the gyro can read. Think about what you are measuring. Do you need to measure the spin of a record player, which is very slow or a spinning wheel, which could be very fast?
Sensitivity
The sensitivity is measured in mV per degree per second (mV/°/s). Don’t let the weird dimension of this value scare you. It determines how much the voltage changes for a given angular velocity. For example, if a gyro is specified with a sensitivity of 30mV/°/s and you see a 300mV change in the output, you rotated the gyro at 10 °/s.
A good rule to remember: as the sensitivity increases, the range decreases. For example, look at the LPY503 gyro datasheet or any gyro with a selectable range:
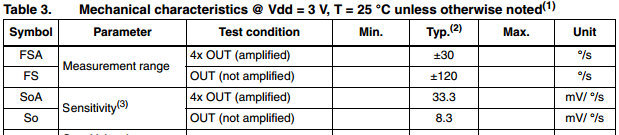
Notice that with a greater range, the sensitivity suffers and you get less resolution.
Bias
As with any sensor, the values you measure will contain some amount of error or bias. You can see gyro bias by measuring the output when the gyro is still. Though you’d think you would see 0° when the gyro is still, you will always see a slight non-zero error in the output. These errors are sometimes called bias drift or bias instability. The temperature of the sensor greatly affects the bias. To help minimize the source of this error, most gyros have a built in temperature sensor. Thus, you are able to read the temperature of the sensor and correct or any temperature dependent changes. In order to correct for these errors, the gyro must be calibrated. This is usually done by keeping the gyro still and zeroing all of the readings in your code.