The weekend is almost here and that means it's time to talk about new products. We just have a few products this week, but we have the new Galileo from Intel as well as another Robotics 101 video.
ReplaceMeOpen
ReplaceMeClose
Just to reiterate, the Galileo is only available for pre-order, and we're not really sure when it will actually show up. Initial quantities are going to be limited, so get in line for the first shipment.
Last week in Robotics 101 we talked about transfer of motion. This week we're discussing precise motion. We'll discuss servos, steppers, and how to get accurate positioning with them. Check it out!
ReplaceMeOpen
ReplaceMeClose
That's all the videos for this week, let's move on to the products!
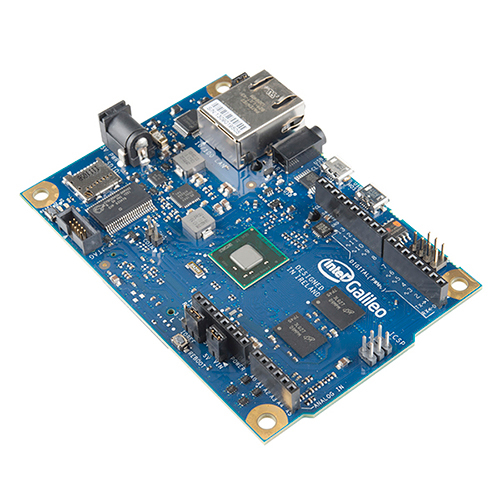
The Galileo is yet another official Arduino board that was announced by Intel at this year's CES. We did a brief overview a couple weeks ago and now we have it available for pre-order. It's interesting to see Arduino getting more mainstream and grabbing the attention of companies like Intel. Check the video above for a brief rundown of what the Galileo is all about.
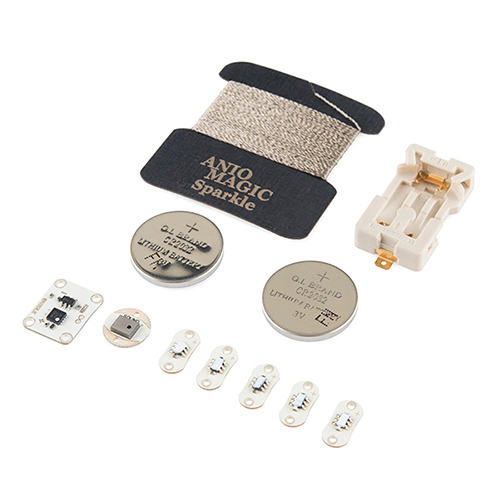
We have a new version of the Sparkle Sound Kit from Aniomagic. The new version is called the Chiclet Sound Kit. The kit consists of one sound sensor, five LED lightboards, a battery holder, a Chiclet, battery, and some conductive thread. As you can see from the video above, it makes adding sound-sensitive LEDs to a project pretty easy.

We've been selling the Arduino and Breadboard holder for many years and this week we have a holder just for the IOIO. It's the same layout as the Arduino version, but has a place for your IOIO instead of an Arduino.

We now have the blue mini modular breadboards in stock. They are the same as the other colors, just in blue! These are the perfect size for those small prototyping projects and they can be screwed down or connected together.

Lastly, we have these AAA PTH battery clips. These simple clips get soldered into a PCB for a simple PCB-mounted AAA battery.
That's all I have for this week, thanks for reading and watching and I'll be back next week with even more new products! See you then.











{kind=link}
Actually, Robert you're actually using the word 'actually' too much. I actually started counting your use of actually and I actually lost count - it actually got close to actually one 'actually' per sentence. 'Actually' actually loses all meaning if you actually overuse the word. Actually, I hope this makes a point as it's actually getting a little distracting to an otherwise interesting and informative post. (recursive and hypocritcal as this actually is - sorry).
hey, i didn't notice that until you pointed it out! <shakes tiny fist> i think he's incredibly professional to reel out all this info so smoothly every week. i am always a little bit impressed. :)
OK OK, I get it. I'll try better.
Hey, I like say like like a lot. :)
Not really, though (not "doh")
I made this for you.
ROFL... that's pretty sweet :-D
For the Galileo, since it's closer to a CPU than MCU, how hot does the chip get? Would it require at least a passive heatsink?
It runs warm enough that I wouldn't leave my finger on it for more than a few seconds. I don't think it's hot enough to require a heatsink, under normal conditions at least. Intel's FAQ says about the same.
Heh, actually, one of their example sketches here uses the Quark's internal temp sensor to turn it into a touch sensor. So they must not be too worried about the heat being damaging :P.
I have one and it does get hot pretty fast. I was concerned at first but like the other poster said Intel states this is normal,
This is a must-have!
The Galileo was debut by Intel on October 2013 at Makerfaire Rome, not CES 2014.
The robotics video did not actually talk about stepper motors. It actually barely scratched the surface in about 5 sentences, or so.
In one of the previous videos, we talk about steppers more. In a future video, we will talk about control systems, and how to control steppers.
Do you know which video?
This one.
Thank you.
Great job with the New product and Robotics 101 videos, by the way.
Thanks. It takes a lot of work.
It seems like you really should be flipping the connections on the potentiometer as the added gear train makes the output shaft turn the opposite direction? Were those 24 credits of controls in college a waste? What am I missing?
You're not missing anything. The pot was just there to sweep the servo. Of course if you want the pot to reflect the position of the arm, you could either flip the pot around (on the breadboard) or even change the code in the Arduino (just reverse the values in the map command). However, this was just to show the sweep and nothing else. Realistically, the pot wouldn't be there and you'd have a much more complex control system. The purpose here was just to show servo modification, so we weren't really focused on a fully fleshed-out control system.
I assume Member #375102 is referring to the relocated feedback pot.
When you relocate the feedback pot, it is possible that the two end connections to the pot will need to be swapped. The reason for this is that depending on which side of the gear train you attach the pot from as well as the number of gears in the gear train may be different and could cause the final arrangement to differ in rotational sense than that in the original servo.
If the rotational sense is different than the original, the servo motor would turn, which would cause the final shaft to turn as well as the pot, but in a direction that will set the pot to a voltage that is further not closer to the desired voltage. It will keep on turning in this direction until it hits a mechanical stop. If you hook it up this way and the pot has internal mechanical stops, the likely result will be a damaged pot unless you remove power before it hits the mechanical stop on the pot.
Test the configuration by temporarily removing the gear which drives the pot. Then manually turning the pot in the direction the gear would be driven when the servo is commanded to change to a new position. This will determine if you need to swap the leads on the pot or not.
If the motor stops before you hit the end limit on the pot, the sense is correct. If not, and it stops if you turn the pot in the opposite direction than the output gear would have turned the pot, you need to reverse the two outside leads on the pot.
Hope this is not too confusing.
noworries has it correct. You can't just flip the pot on the output shaft.
Great video Robert!
So you guys are the ones that brought down Gmail yesterday... hmm interesting !!
From what I recall, the Intel Galileo is actually closer to a hybrid between a 486 and a first-generation Pentium processor than it is to the Atom processors you're comparing it to. In particular, it has no support for any of the newer instruction sets like MMX, SSE, or SSE2 - a lot of modern software expects these, especially the kind of x86-only or tuned-for-x86 code that might otherwise give this an advantage over ARM platforms.
Are the motor mounts for the stepper motor shown in the precision motion video available for purchase, or were those just made custom for the sake of the video?
They were made custom, but in a few weeks we should have real ones for purchase.
Do the robotics gears and channels and such have the holes already threaded. Or do we need to (got to word this carefully) tap that our selves? don't know how else to word it :(