Many moons ago, in a SparkFun chair not so far away, I sat down and built a WALL-E kit I got as a gift. It was my first week here, and I knew almost no one in the building. This guy stopped by and asked me what I was doing, thus launching a 20-minute geek-out session about building block kits, hobby motors, all the fun hacks that were possible, and why my toolkit included purple eyebrow tweezers (for real, they are great for fine board work). Turns out, that guy was our founder Nate – pretty much the coolest intro to a company ever.
WALL-E unfortunately sat on my desk for months, staring at me forlornly until I couldn't take it anymore.

Cue up the DC motors, serial-controlled motor driver and micro:bits. Inspired by Bobby's micro:bit tutorial here, I set about rebuilding the innards of my bot to give myself more space for boards and the like. The kit and instructions are amazing; I may have uttered some impolite words about my ineptitude at reverse engineering said kit.
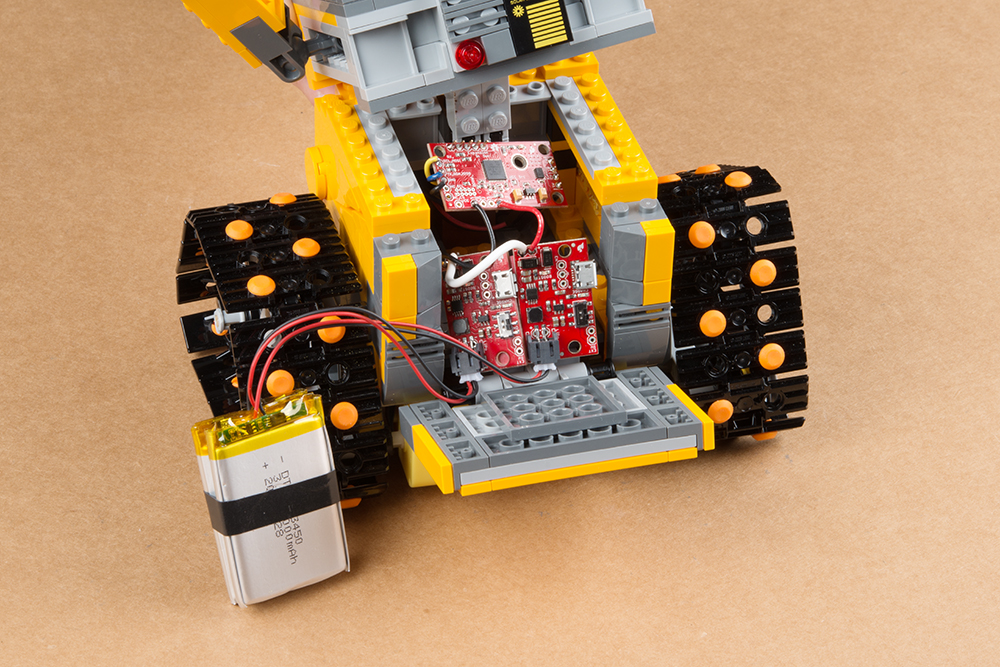
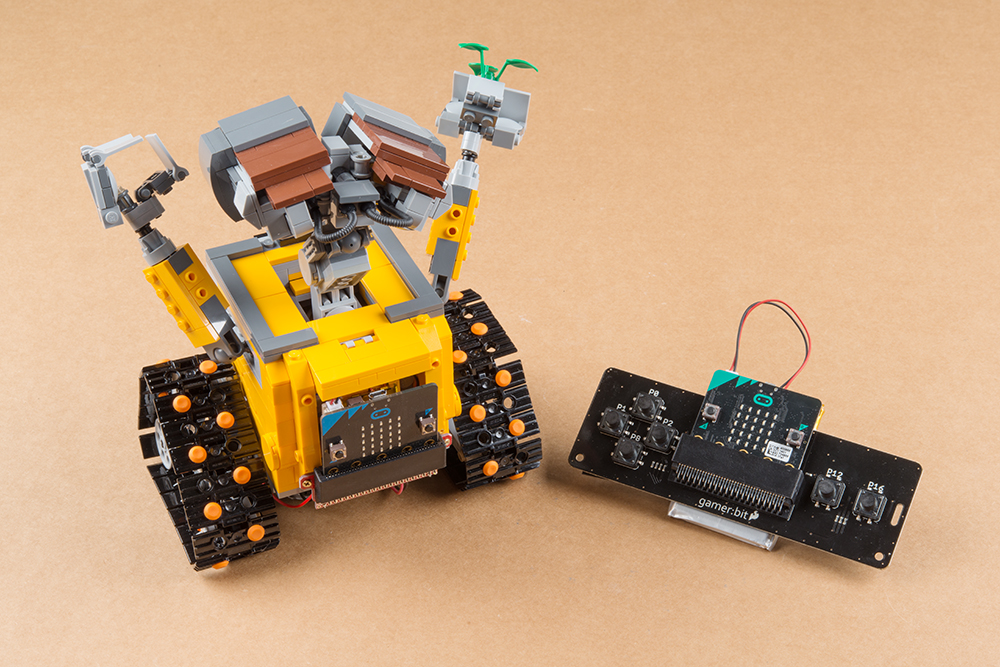
Even with the additional space, I had to downsize everything. I had wanted to use the moto:bit, but with the space issues, there was no way. Instead I used the serial-controlled motor driver and powered the motors with two LiPos in series, using the LiPo Charger/Booster - 5V/1A. The micro:bit got hooked up to our SparkFun micro:bit Breakout and set up as a backpack. I used the gamer:bit as a controller to send wireless commands to WALL-E.
I got a nice surprise when I found that the moto:bit and the serial-controlled motor driver both use the same chip, so the MakeCode I wrote for the moto:bit in prototyping still worked just fine.
At some point in the future I might add sound, but I may need to do a complete rebuild of the bot for an MP3 trigger and speaker. For now, he'll drive around and deliver candy to my co-workers, especially as they did not call me out on all my impolite words.
Have you used our boards to hack your various kits? Or do you have other bot projects you used our boards for? Tell us in the comments!







{kind=link}
My kids and I were there picking up some parts right after you built that! They were amazed by it and still talk about it now and then. Great to see you got it up and running!
If you end up swinging by with the kids again, have the front desk give me a shout - I'll bring Wall-E down and they can drive him around. :D
On the subject of "impolite language", I heard a quote maybe 38 years ago to the effect that "the one language ALL programmers are fluent in is 'obscenities'".
I had one software technician tell me she could tell when I was really angry because I'd start using scientific language to describe what I normally used obscenities for...
So true!
One of the best animated robots ever.
Agreed.
@ell c, super interesting, thanks for sharing.
How did you make the wall-e body and eyes? Is there any instructions for that?
The body and eyes are part of a lego kit I was given for Christmas. You can check it out on the lego site here: https://www.lego.com/en-gb/product/wall-e-21303
I did have to do a bit of reverse engineering to give myself more internal space for the electronics, but otherwise, it was just the kit. :D
I just showed this to Jack and he said, "Cooooooooooooooooooooooooool!"
Great build Ell! Question for you: how did you couple the DC motors to Lego bricks? That's something I looked into (e.g. 3D printed couplers) but never had much luck.
There are a few ways, actually. I tried a couple of 3d prints, but ended up buying a third party dc-motor-to-lego-axle-adapter. Next time I'm actually going to try hacking the hobby motor itself via this instructable.
I'm also lobbying SparkFun to carry more lego adapters because... legos.
Yaaaes, I was hoping someone would be inspired by the tutorial to build different sized robots. =) I'm glad to see it working and driving around the building. Also, my mind is still blown by the fact that the serial controlled motor driver parts were used on the moto:bit.
Yeah, I was pretty excited that I didn't have to dig in and re-write my motor code. SO COOL.