ToF Explained: iToF and dToF

Let's go over what Time-of-Flight is and what the differences between iToF and dToF are.
So, you've come here because you want to know more about how Time-of-Flight works. Great! We'll go over some basic definitions and use cases below. First thing's first...
What is ToF?
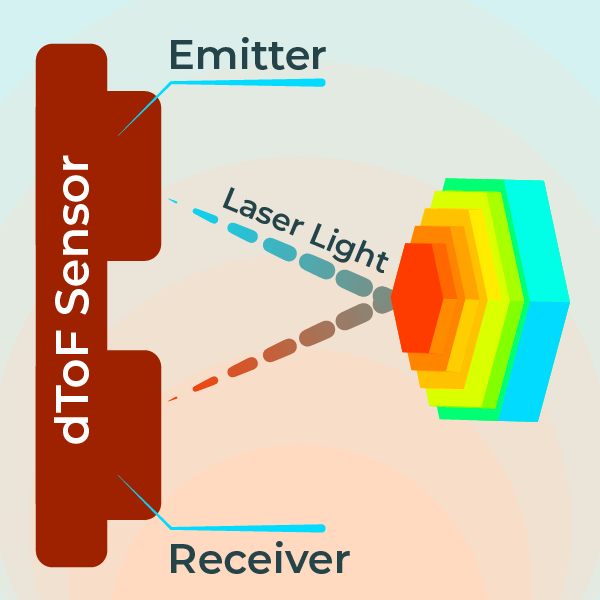
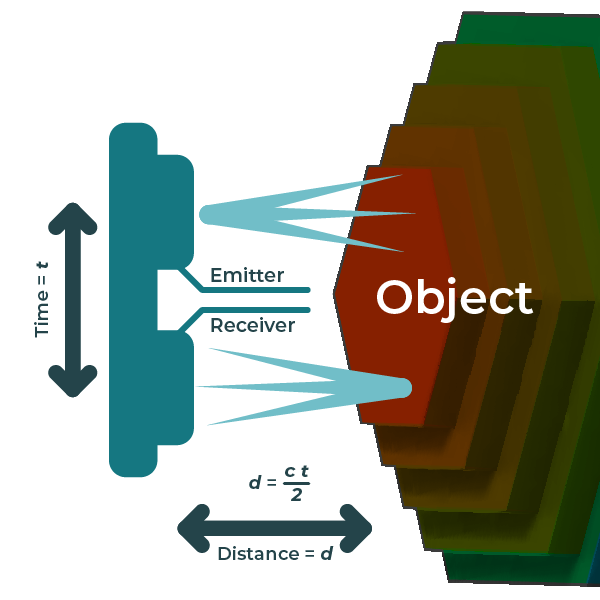
Time-of-Flight actually refers to the Time-of-Flight Principle. The Time-of-Flight Principle is based on measuring the time it takes for a wave of light (typically IR waveforms spanning lengths from 700nm to 1mm) to travel from a source (dToF) to an object and back. ToF is one of several methods of capturing 3D images to recreate depth perception using structured light imaging (where a structured image, such as a grid, is projected onto an object and the shape and distance of that object is calculated based on the distortion to the grid).
Working conditions
One of the biggest advantages of ToF is its ability to operate even when there is little to no light. ToF is considered an “active” imaging technique, one that relies on projecting its own light. With that being said, they may perform poorly in natural surroundings (exposed to sun). Shiny surfaces and corners are also times where the sensor may perform poorly. Thus, while ToF may work on shorter ranges, it may not be the best for use-cases where not the range, but the accuracy is the guiding factor in consideration.
Precision
The ToF camera accuracy is largely dependent on the distance from the object as it is generally estimated at 1% of that value (so if an object is 5 meters away, a ToF camera can achieve an accuracy of about 5 cm).
| Board | Imager | Min Range (cm) | Max Range (cm) | Accuracy |
|---|---|---|---|---|
| SparkFun Distance Sensor - 1.3 Meter, VL53L4CD (Qwiic) | No | 1 | 1300 | +/-5% |
| SparkFun Distance Sensor Breakout - 4 Meter, VL53L1X (Qwiic) | No | 4 | 400 | +/-3% |
| SparkFun ToF Range Finder Sensor - VL6180 | No | 0 | 10+ | not defined |
| SparkFun Qwiic Mini ToF Imager - VL53L5CX | Yes 8x8 | 10 | 400 | +/-5% |
| SparkFun Qwiic Mini dToF Imager - TMF8820 | Yes 3x3, 4x4, 3x6 or 8x8 | 10 | 500 | +/-3% |
| SparkFun Qwiic Mini dToF Imager - TMF8821 | Yes 3x3, 4x4, 3x6 or 8x8 | 10 | 500 | +/-3% |
Where do you apply the time-of-flight principle? Some use-cases.
People counting - Time-of-flight technologies really came into the limelight in 2020 when social distancing and occupancy management became a necessity for many businesses. The biggest benefit of using time-of-flight technologies for people counting is that they ensure high count accuracy (up to 98%), which is particularly important when occupancy is limited by legal regulations. At the same time, the sensors provide a non-participating, yet also non-intrusive means of people counting.
Robotics - ToF sensors, for example, robotic arms can sort objects down an assembly line and autonomous forklifts can pick up and carry cargo. 3D ToF cameras are used in autonomous drones and some smart appliances such as robotic vacuum cleaners, where they ensure your device can safely avoid all obstacles.
Smartphones - Mostly, it is used to enhance the quality of photos you take. Since it can sense depth, the phone can use it to better understand what constitutes a background in the photo. Technologies based on time-of-flight are also used for motion detection and gesture recognition, making it possible to use your phone without actually touching it. There are even apps that use ToF sensors in your phone for distance measuring!
MRA Scanning - Time of flight sensors are used in medicine(MRA scanning). MRA scanning is a type of MRI that looks specifically at the body’s blood vessels. For Magnetic Resonance Angiography (MRA), ToF is a major underlying method. In this method, blood entering the imaged area is not yet saturated, giving it a much higher signal when using short echo time and flow compensation. It can be used in the detection of aneurysm, stenosis or dissection
What is the difference between dToF and iToF?
Now that we understand what ToF is, let's get into what separates dToF from iToF.
dToF (Direct Time-of-Flight) - Method used in all Sparkfun ToF devices. Involves a simple, direct measurement of the time until reflection is detected. Direct ToF sensors send out short pulses of light that last just a few nanoseconds and then measure the time it takes for some of the emitted light to come back
iToF (Indirect Time-of-Flight) - Measures distance by collecting reflected light and discerning the phase shift between emitted and reflected light. Especially effective in high-speed, high-resolution 3D imaging of objects at short and long distances. Indirect ToF sensors send out continuous, modulated light and measure the phase of the reflected light to calculate the distance to an object.
What makes the device an imager?
The device actually acts as a camera. In fact, new sensors are coming out with higher resolution IR and depth images. ToF is considered an “active” imaging technique, one that relies on projecting its own light.
How does the grid work?
With the SparkFun Qwiic Mini ToF Imager - VL53L5CX, multi zone distance measurements up to 4000mm are possible across all 64 zones with a wide 63° diagonal field-of-view which can be read up to 15Hz. Thanks to ST Histogram patented algorithms, the VL53L5CX is able to detect different objects within the FoV. The Histogram also provides immunity to cover glass crosstalk beyond 60cm
$25.95
Let us know if you have any comments or questions about DToF or IToF in the comment section below. Also share your ToF projects with us by shooting us a tweet @sparkfun, or on Instagram, Facebook or LinkedIn.


{kind=link}