- Home
- Product Categories
- IMU
- SparkFun UDB5 - PIC UAV Development Board

{kind=link}
SparkFun UDB5 - PIC UAV Development Board
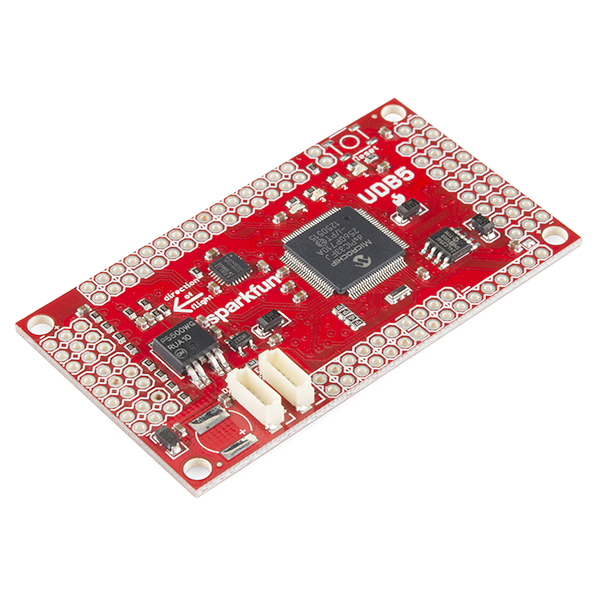
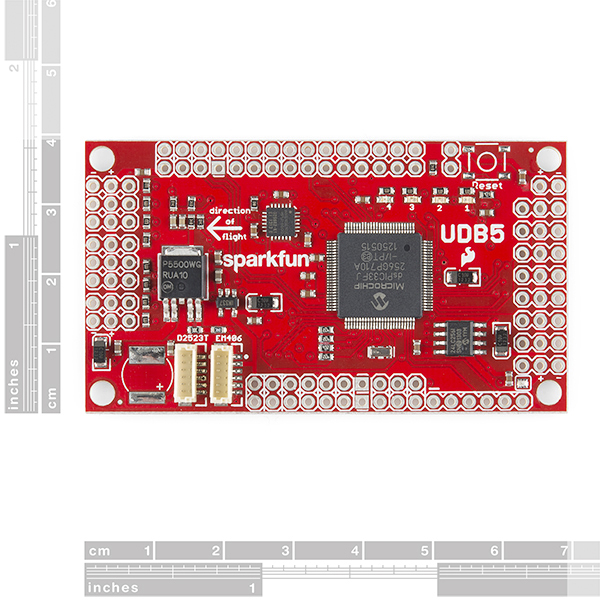
Our UAV Development Board is back! The UDB5 (UAV Development Board version 5) comes populated with a dsPIC33FJ256 CPU, and the impressive MPU-6000, a MEMS 3-axis gyroscope and 3-axis accelerometer. The on-board Invensense gyro even has enough vibration tolerance to be used in RC heli applications.
By itself, the board can be used to develop a three axis IMU controller. By addition of an EM406 or D2523T GPS receiver, it can be used to develop a UAV controller for an RC car, plane, helicopter, or boat. It comes with self-testing firmware that can serve as a starting point for you to develop your own control and navigation firmware. There is even fully functional, open source autopilot firmware available. We've made a few changes with the UDB5, we've removed the MMA7361 three axis accelerometer, the dual axis IDG500 gyro, and the single axis ISZ500 gyro and moved to an MPU-6000. The PCB form factor hasn't changed. If you like, you can add a reset button and/or a 0.2F super cap.
Note: For programming, we recommend the PICkit3. Check the related products below.
Note: A GPS module is not included. Check the related products below.
Replaces:GPS-11115
- compatible with 20-channel EM-406A SiRF III GPS
- compatible with 48-channel EM-506 GPS with SiRF Star IV chipset
- compatible with 50-channel GS407 Helical GPS
- dsPIC33FJ256GP710A Controller (with onboard 3.3V and 5V glue logic)
- dsPIC runs at 80MHz (40 MIPS) with 8MHz resonator and PLL
- MPU-6000 MEMS 3-axis gyroscope and 3-axis accelerometer
- External 256Kbit EEPROM
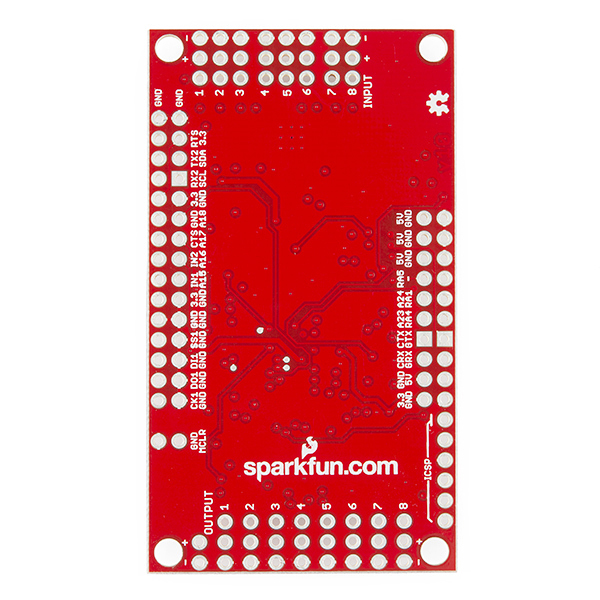
- Up to 8 Input, 8 output PWM points
- 6-wire debug header or ICSP header
- 4 separate colored status LEDs
- On board 3.3V and 5V regulators (150mA max)
- Spare USART connection for debugging, flight logging, wireless telemetry, etc.
- I/O pins include a CAN, an I2C, and a SPI port
- 30 spare analog and digital I/O pins for debugging and interfacing to sensors
- Schematic
- Eagle Files
- GitHub Hardware Files
- [Datasheet](http://cdn.sparkfun.com/datasheets/Components/General IC/PS-MPU-6000A.pdf) (MPU-6000)
- MatrixPilot Firmware Home
- MatrixPilot Firmware Downloads
- DIYDrones UDB Page
- DIYDrones UDB Article (how the UDB handles sustained rotations)
SparkFun UDB5 - PIC UAV Development Board Product Help and Resources
Core Skill: Soldering
This skill defines how difficult the soldering is on a particular product. It might be a couple simple solder joints, or require special reflow tools.
Skill Level: Rookie - The number of pins increases, and you will have to determine polarity of components and some of the components might be a bit trickier or close together. You might need solder wick or flux.
See all skill levels
Core Skill: Robotics
This skill concerns mechanical and robotics knowledge. You may need to know how mechanical parts interact, how motors work, or how to use motor drivers and controllers.
Skill Level: Expert - In addition to having a solid foundation in robotics, you will need to know how sensors integrate with complex robotic systems. You will need to understand how to implement IMUs, UAV controllers, etc.
See all skill levels
Core Skill: Programming
If a board needs code or communicates somehow, you're going to need to know how to program or interface with it. The programming skill is all about communication and code.
Skill Level: Competent - The toolchain for programming is a bit more complex and will examples may not be explicitly provided for you. You will be required to have a fundamental knowledge of programming and be required to provide your own code. You may need to modify existing libraries or code to work with your specific hardware. Sensor and hardware interfaces will be SPI or I2C.
See all skill levels
Core Skill: Electrical Prototyping
If it requires power, you need to know how much, what all the pins do, and how to hook it up. You may need to reference datasheets, schematics, and know the ins and outs of electronics.
Skill Level: Competent - You will be required to reference a datasheet or schematic to know how to use a component. Your knowledge of a datasheet will only require basic features like power requirements, pinouts, or communications type. Also, you may need a power supply that?s greater than 12V or more than 1A worth of current.
See all skill levels
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
No reviews yet.
@member427317
It has been my goal to use algorithmic innovations to squeeze as much performance as possible from minimum hardware, to come up with an inexpensive hardware platform that will satisfy most of the users, and support optional sensors such as magnetometer, pitot and barometer for other users.
For fixed wing, the MartrixPilot firmware actually works better without a magnetometer than with one. For multicopter, a magnetometer is necessary, it can be mounted directly to the board.
For more information on the algorithmic innovations in the firmware take a look at the following collection of discussions:
http://www.diydrones.com/page/uav-devboard
Also, take a look at the following discussion thread on diydrones:
http://www.diydrones.com/profiles/blogs/udb5-available-now-from-sparkfun
Best regards, Bill Premerlani
Makes sense. I've been building my own board in the interest of learning the complexities of stabilization, and I love looking at other work to get an idea of how it's done. This thing looks beautiful btw :)
Out of curiosity why isn't there a magnetometer on this board?
You recommend PICKit3, for the UDB5 What if I already have a PICKit 2 ? is there any incompatibility ?
I've been through all the MatrixPilot stuff and find it really impressive,
However, I 'd like to know how many hours/Days are req'd to pro[erly configure the board for a first flight ?
Best regards jjdavidian
Regarding PICKit3/2, UDB5 can be programmed with PICKit2, but it is not easy. I recommend PICKit3.
Regarding time required to configure the board, I suggest you post your question to the UDB community and get a range of answers from UDB users. The link is in the list of documents above, click on "MatrixPilot Firmware Home".
Best regards, Bill Premerlani
The EM-506 is now available from SparkFun: https://www.sparkfun.com/products/12751
UDB users: The EM-406 GPS has reached its end of life, and is no longer available. As "MagicRub" mentioned, the EM-506 is now available from SparkFun. I have tested it, it is a direct replacement for the EM-406 for use with UDB and MatrixPilot. Best regards, Bill Premerlani