- Home
- Product Categories
- Robotics Kits
- SparkFun Advanced Autonomous Kit for Sphero RVR


{kind=link}
SparkFun Advanced Autonomous Kit for Sphero RVR
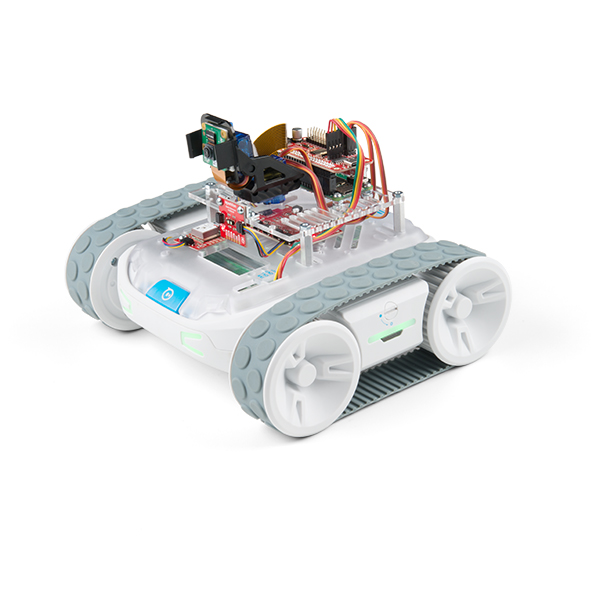
The SparkFun Advanced Autonomous Kit for Sphero RVR (pronounced "Rover") provides all the functionality of the basic kit with the addition of time-of-flight distance sensing in the front and rear. Based around Raspberry Pi’s small yet powerful Zero W model, the kit provides distance sensing, global positioning, and vision to the Sphero RVR.
A pan-tilt device allows a camera to not only provide video from the viewpoint of the RVR, but provide the ability to look around it as well. In addition, the Raspberry Pi Zero W and the Camera provide enough power to run most of the machine vision programs that will run on the Raspberry Pi platform.
The Qwiic distance sensing boards use time-of-flight technology to provide highly accurate distance sensing for things like collision and obstacle detection. The GPS board provides global position capabilities to the RVR. Whether you’re setting up a geofence which the RVR must stay inside or mapping where the RVR has been, the board has the accuracy and capability to work for a small object such as the RVR. Pair these items with the already stellar sensor set of the RVR and the device has an advanced set of sensing abilities for autonomous mobility.
The kit itself comes with all the cables and mounting hardware including a separate mounting plate that provides extra space for mounting additional sensors or devices such as SparkFun’s Qwiic line, which pairs with the rest of the devices with ease.
Note: A Sphero RVR is not included with this kit and will need to be purchased separately.
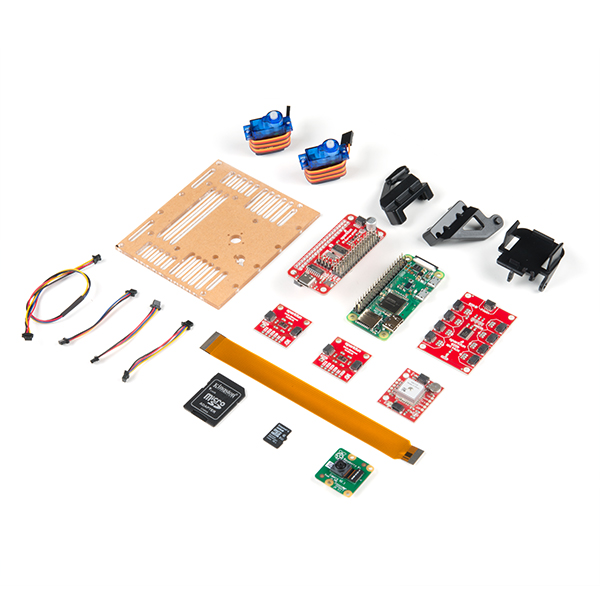
- Raspberry Pi Zero WH (Male Headers Pre-Soldered)
- SparkFun Servo HAT
- Raspberry Pi Camera V2
- GPS Breakout XA1110 (Qwiic)
- 2 x Distance Sensor Breakout - 4 Meter, VL53L1X (Qwiic)
- Qwiic Mux Breakout
- Pi Zero Camera Interface Cable
- 16GB MicroSD card with custom firmware pre-loaded
- Pan-Tilt Servo and Hardware Kit
- Mounting Plate
- All the mounting hardware and cables required for working with the Sphero RVR
- Raspberry Pi Zero WH
- 802.11 b/g/n wireless LAN
- Bluetooth(R) 4.1
- Bluetooth Low Energy (BLE)
- 1GHz, single-core CPU
- 512MB RAM
- Mini HDMI and USB On-The-Go ports
- Micro USB power
- HAT-compatible 40-pin header pins
- Composite video and reset headers
- CSI camera connector
- Servo HAT
- 16 Servo motor Pin Headers
- Qwiic Header for Qwiic Interface
- 4 Pin UART interface
- MicroUSB B Connector
- Raspberry Pi Camera Module V2
- Image Sensor: Sony IMX219
- Maximum Photo Resolution: 3280 x 2464 pixel
- Supported Video Resolution: 1080p30, 720p60 and 640x480p90
- Interface: CSI connector (15cm ribbon cable included)
- Supported OS: Raspbian (latest version recommended)
- GPS Breakout XA1110 (Qwiic)
- 33 tracking/99 acquisition-channel GPS +GLONASS receiver
- Sensitivity: -165dBm
- 3m Horizontal Accuracy
- 10Hz Max Update Rate
- Time-To-First-Fix:
- Cold: 35s
- Warm: 33s
- Hot: 1s
- Max Altitude: 10,000m maximum
- Max G: ≤4
- Max Velocity: 515m/s
- Velocity Accuracy: 0.05m/s
- Time Pulse Accuracy: ± 10ns RMS within 100ms in one pulse
- 3.3V VCC and I/O
- Current Consumption: ~25mA Tracking GPS+GLONASS
- Software Configurable
- Odometer
- Spoofing Detection
- External Interrupt
- Pin Control
- Low Power Mode
- Many others!
- Supports NMEA and RTCM protocols over UART or I2C interfaces
- Distance Sensor Breakout - 4 Meter, VL53L1X
- Operating Voltage: 2.6V-3.5V
- Power Consumption: 20 mW @10Hz
- Measurement Range: ~40mm to 4,000mm
- Resolution: +/-1mm
- Light Source: Class 1 940nm VCSEL
- I2C Address: 0x52
- Field of View: 15° - 27°
- Max Read Rate: 50Hz
- Mounting Plate
- Dedicated positions for the boards included (minus GPS board which mounts to the cover plate on the RVR)
- Additional mounting points for I/O via 4-40 hardware.
SparkFun Advanced Autonomous Kit for Sphero RVR Product Help and Resources
Getting Started with the Autonomous Kit for the Sphero RVR
December 13, 2019
Want to get started in robotics? Look no further than the SparkFun autonomous kit for the Sphero RVR! Whether you purchased the Basic or Advanced kit, this tutorial will get you rolling...
Qwiic MUX Hookup Guide
July 19, 2018
Have a bunch of sensors with the same I2C address? Put them on the Qwiic MUX (TCA9548A) to get them all talking on the same bus!
Qwiic Distance Sensor (VL53L1X, VL53L4CD) Hookup Guide
February 10, 2022
The Qwiic Distance Sensor - VL53L1X is a time of flight sensor that is capable of several modes, as well as having a range of 4M. It's cousin VL53L4CD is also a time of flight sensor with similar characteristics but it has a range of about 1.3M. Let's hook it up and find out just how far away that thing over there is.
Advanced Autonomous Kit for Sphero RVR Assembly Guide
December 12, 2019
Get your Advanced Autonomous Kit for the Sphero RVR built up with this hookup guide!
Pi Servo pHAT (v2) Hookup Guide
July 11, 2019
This hookup guide will get you started with connecting and using the Pi Servo pHAT on a Raspberry Pi.
Core Skill: Robotics
This skill concerns mechanical and robotics knowledge. You may need to know how mechanical parts interact, how motors work, or how to use motor drivers and controllers.
Skill Level: Competent - You may need an understanding of servo motors and how to drive them. Additionally, you may need some fundamental understanding of motor controllers.
See all skill levels
Core Skill: DIY
Whether it's for assembling a kit, hacking an enclosure, or creating your own parts; the DIY skill is all about knowing how to use tools and the techniques associated with them.
Skill Level: Noob - Basic assembly is required. You may need to provide your own basic tools like a screwdriver, hammer or scissors. Power tools or custom parts are not required. Instructions will be included and easy to follow. Sewing may be required, but only with included patterns.
See all skill levels
Core Skill: Programming
If a board needs code or communicates somehow, you're going to need to know how to program or interface with it. The programming skill is all about communication and code.
Skill Level: Competent - The toolchain for programming is a bit more complex and will examples may not be explicitly provided for you. You will be required to have a fundamental knowledge of programming and be required to provide your own code. You may need to modify existing libraries or code to work with your specific hardware. Sensor and hardware interfaces will be SPI or I2C.
See all skill levels
Core Skill: Electrical Prototyping
If it requires power, you need to know how much, what all the pins do, and how to hook it up. You may need to reference datasheets, schematics, and know the ins and outs of electronics.
Skill Level: Rookie - You may be required to know a bit more about the component, such as orientation, or how to hook it up, in addition to power requirements. You will need to understand polarized components.
See all skill levels
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
3 out of 5
Based on 4 ratings:
2 of 4 found this helpful:
Awful; Don’t Order if you are a novice
Easy enough top assemble but getting the software working and connecting it to your phone proved to be a bridge too far for me. I wrote Sparkfun several times and they sent me a link that was written for somebody with far more understanding of robots than me.
1 of 2 found this helpful:
Not Recommended
The assembly documentation for this kit is great but once you get things set up you're left to fend for yourself with virtually zero resources. The Sparkfun and Sphero forums are virtually non-existent on this front and there is minimal other resources available.
Unless you have advanced level experience with the Raspberry Pi and Python, this is not the kit for you.
Really good starting Point
i really love this kit. it is a good startig point when you already have some experience with python, but not so super much experience with with all these hardware and sensors. it was fun to put it all together and works fine. also it was possible to build a nice game for my kids with this components. the sd card is a bit small, i changed to a 32GB Model. and the micro servos are not very robust, i hope i can change them with the MG90S Model.
Works great with the Pi and with Arduino Uno
This is a parts kit, not a "some assembly required" toy kit. And it's a great kit when you keep that in mind! I ordered this kit to use with Arduino Uno and the Sphero RVR for a university project class, and it's perfect.
It's important to read the description, as this kit DOES NOT INCLUDE THE RVR. But, the sensors are well worth the price. If you don't want a certain sensor, then just look at the parts list and you can order each of the parts individually from Sparkfun.
To use with the Arduino Uno, make sure to order one of their Arduino Qwiic shields. I soldered mine together and plugged the sensors in and they all work great! The guide for the kit is super helpful as well.
Overall, awesome kit. All sensors arrived in good condition and they all work, and there are extra mounting parts to help you configure the setup how you want to!
Can raspberry pi 3 model b+ be used instead of zero w with this kit?
If you can find a suitable external USB power supply for the Pi 3B+, that would be an optional work around for your use case.
The RVR unfortunately can't provide enough power for the kit with any of the Model B boards. It requires external power as well.
I’ve been watching these kits for a while. Are they ever going to be available?
They will, we're currently dealing with a parts shortage.
Hello, I wanted to ask if there will be instruction how to build the kit and connect it to the RVR? Will it have some instruction how to connect to it and get into program it? Thank you!
Just a heads up, I made the tutorials live a few hours ago.
Thank you!
Thanks SCI ... just what I’ve been looking for! :thumbs-up:
There will be tutorials up shortly.
Is this kit, with the RVR, autonomous "out of the box", or do I have to develop my own program for it? If so, can it be programmed with the "block programming" approach, like the other Sphero robots ?
You can interface with the Sphero RVR with the EDU app, which is what I assume you are referring to as working "out of the box". However, this kit uses a Raspberry Pi to interface with the included hardware and the Sphero RVR. Sphero has written an SDK package that uses Python to control the Sphero RVR. Additionally, we have written Python packages to interface with the various Qwiic boards included in this kit.
The getting started guide, should be laid out so that even beginners can start playing with the kit. However, to start doing the "cool" stuff, users will need to learn how to program in Python.
You will need to do some programming. At the moment there isn't support for block programming, but it could be something that comes in the future.
When is this shipping? The Sphero RVRs have already shipped.
I’m OK to have this on hand even without the example code.
We're working on getting these out in the next few weeks. We hit some code roadblocks, but those seem to be clear.
Great, thanks!
Do you provide the source code?
There is a GitHub Repository for the Sphero SDK (Python code), Python packages for the Qwiic modules, the example code, and the Pi Camera web interface. You can find all the links in the Resources and Going Further section of the getting started guide.
There will be example code available.