- Home
- Product Categories
- Distance
- SparkFun Pulsed Radar Breakout - A111

{kind=link}
SparkFun Pulsed Radar Breakout - A111
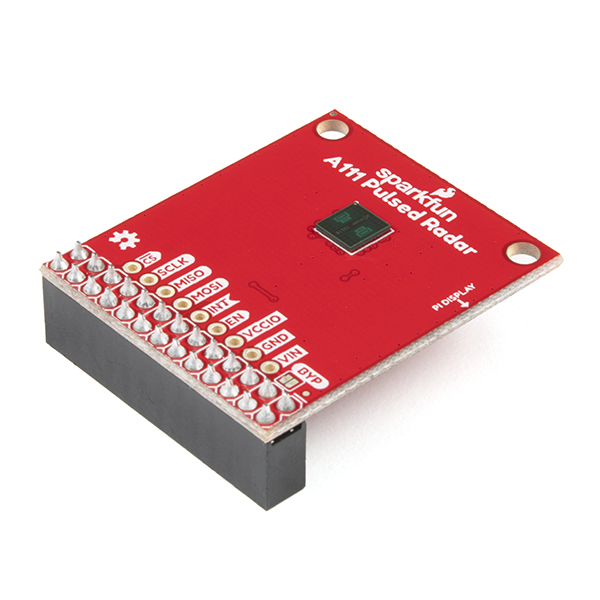
Does your project require high-precision, cutting-edge distance measurement? Or maybe speed, motion, or gesture-sensing? We're not talking about simple ultrasonic or even infrared here, but 60GHz radar! Well say hello to the SparkFun A111 Pulsed Radar Breakout! The A111 is a single-chip solution for pulsed coherent radar (PCR) and comes complete with an integrated antenna and an SPI interface capable of clock speeds of up to 50MHz. Though the A111's primary use case is distance-sensing, it also supports applications in gesture, motion, material, and speed-detection at distances of up to two meters.
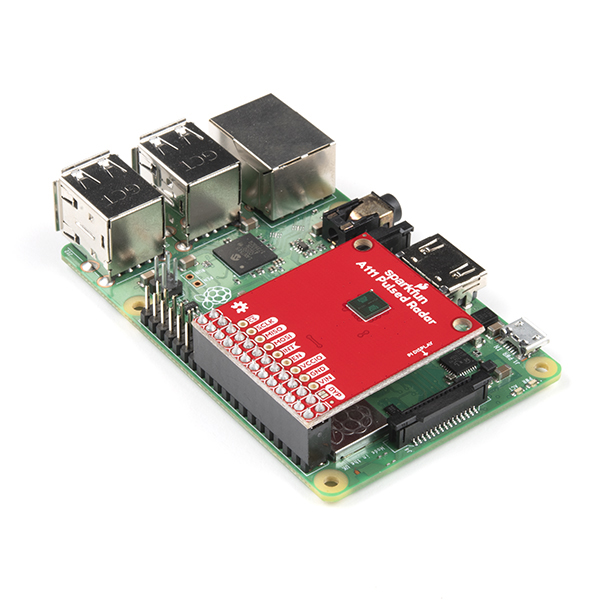
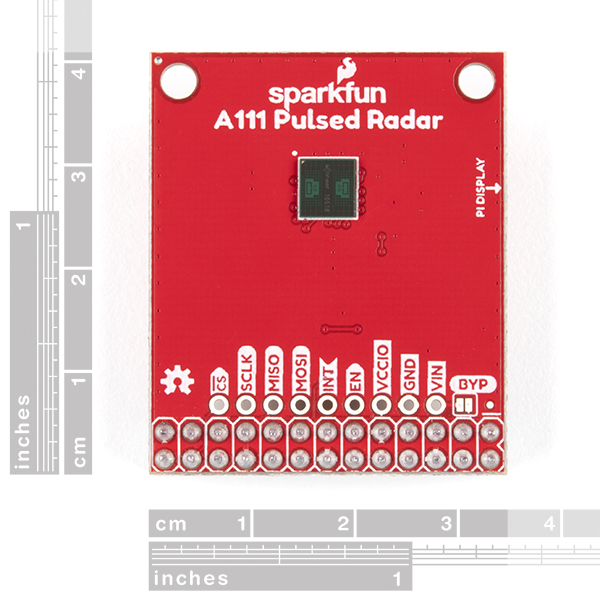
SparkFun Pulsed Radar Breakout for the A111 includes a 1.8V regulator, voltage-level translation, and it breaks out all the pins of the pulsed radar sensor to both 0.1-inch and Raspberry Pi-friendly headers. The Pulsed Radar Breakout is designed to sit directly on top of a Raspberry Pi but it doesn't span all 40 (2x20) pins of a Raspberry Pi B+ (or later), but the 26-pin -- 2x13 -- header should be compatible with any Pi.
Acconeer has developed a visualization tool written in Python that demonstrates data collection in real time. It's called the Acconeer Exploration Tool and is an incredible resource when first starting out with the A111 Pulsed Radar. As an example it will graph distance or presence sensing, giving you a count of the number of sweeps, which communication port (SPI or I2C) data is being sent through, and much much more. The tool supports both Windows and Linux and requires Python version 3.6 or later. This tool is available through their GitHub Repository, go on over a take a look!
Note: The A111 Pulsed Radar Breakout does not include a Raspberry Pi. This will need to be purchased separately.
Heads up! The A111 was designed to work with an ARMv7 to work at a minimum. We were able to get the sensor working on the Raspberry Pi 3, 3B+, and 4.
- 1x SparkFun Pulsed Radar Breakout Board - A111
- 1x Female Header - 26-pin (2x13)
- 60 GHz Pulsed Coherent Radar (PCR) sensor
- Integrated antenna
- Measurement distance up to 2m
- Accuracy down to mm-range
- SPI interface -- up to 50MHz SPI clock support
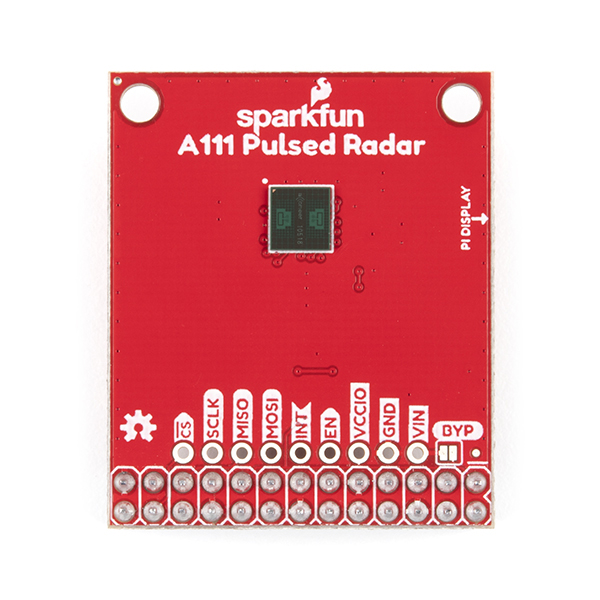
- All SPI pins broken out
- On-board 1.8V voltage regulator
- 1.8V level translation to any voltage between 1.8V-5V
- Bypass jumper
Revision Changes: Overall, the functionality between v1.0 for v1.1 is the same. Minor changes in v1.1 include:
- PTH for VCCIO
- Bypass jumper to set VCCIO to VIN
- Silkscreen name change for input voltage (5V => VIN)
- Improved logic level translation on the Raspberry Pi side
{kind=link}
SparkFun Pulsed Radar Breakout - A111 Product Help and Resources
Getting Started with the A111 Pulsed Radar Sensor
September 26, 2019
Get started with the Acconeer A111 SDK with a Raspberry Pi! The tiny A111 pulsed coherent radar (PCR) adds high-precision, cutting-edge distance measurement for speed-, material-, motion-, or gesture-sensing projects! We’re not talking about simple ultrasonic, or even infrared sensors here, but 60GHz radar!
Core Skill: Programming
If a board needs code or communicates somehow, you're going to need to know how to program or interface with it. The programming skill is all about communication and code.
Skill Level: Experienced - You will require a firm understanding of programming, the programming toolchain, and may have to make decisions on programming software or language. You may need to decipher a proprietary or specialized communication protocol. A logic analyzer might be necessary.
See all skill levels
Core Skill: Electrical Prototyping
If it requires power, you need to know how much, what all the pins do, and how to hook it up. You may need to reference datasheets, schematics, and know the ins and outs of electronics.
Skill Level: Rookie - You may be required to know a bit more about the component, such as orientation, or how to hook it up, in addition to power requirements. You will need to understand polarized components.
See all skill levels
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
4 out of 5
Based on 3 ratings:
I hope it becomes the best thing I ever owned
It would be very helpful if in Hook Up page Sparkfun included pins assignments for STM32 Thing Plus
Works great
Building new K9
Working as expected
Working as expected. Native exploration app demoing a lot of interesting use cases.
The most modern is A121 A121 is more sensitive and has lower power consumption than A111. The A121 is also more future-proof from an SW API point of view, Acconner would only recommend A111 if the time to market is critical or a few cost-sensitive use cases.