- Home
- Product Categories
- Raspberry Pi HATs
- SparkFun Qwiic pHAT v2.0 for Raspberry Pi


{kind=link}
SparkFun Qwiic pHAT v2.0 for Raspberry Pi
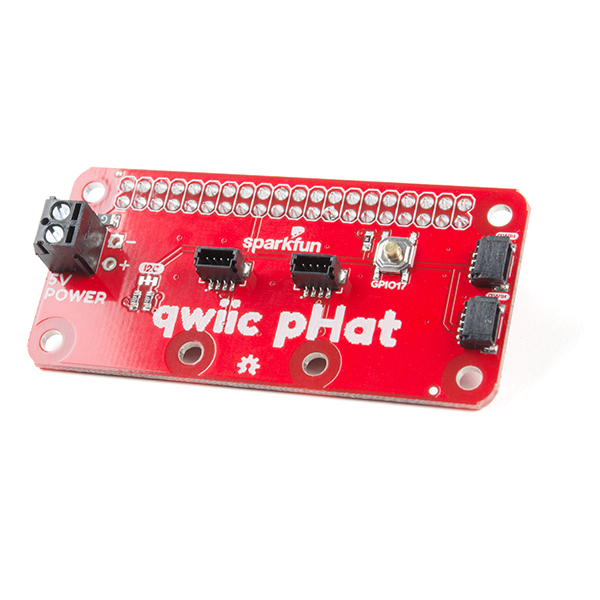
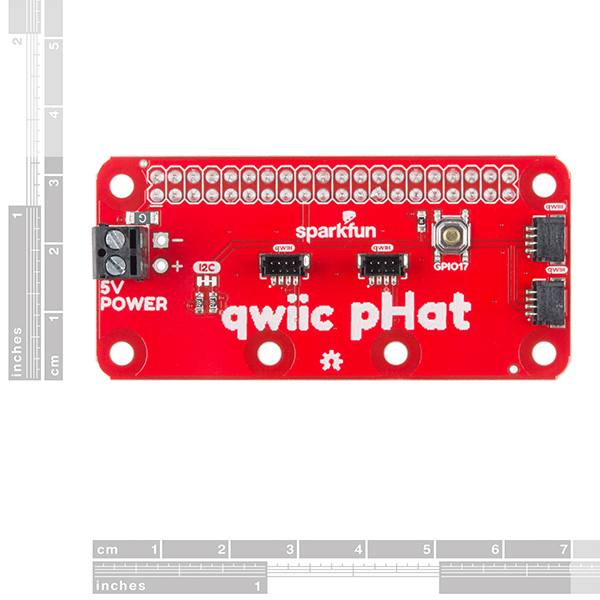
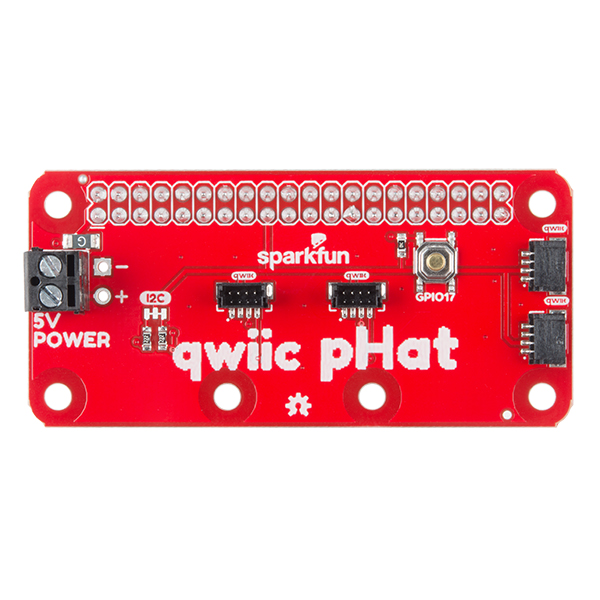
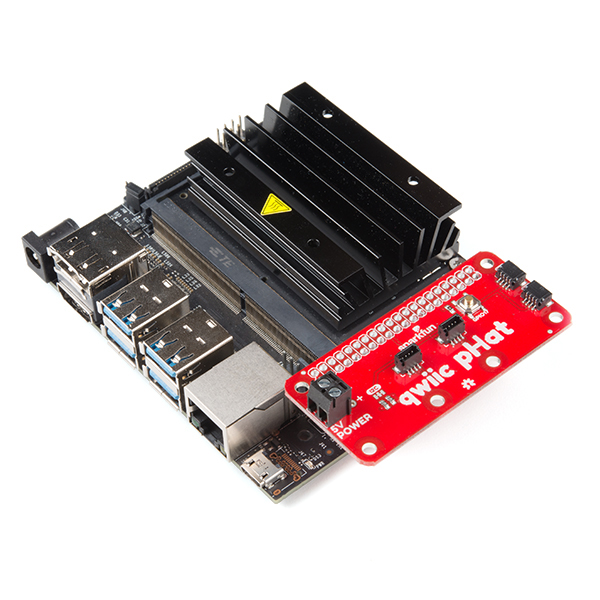
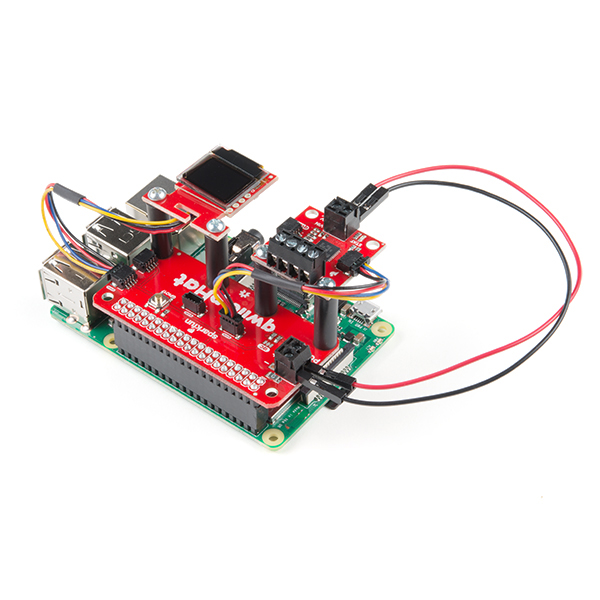
The SparkFun Qwiic pHAT V2.0 for Raspberry Pi provides you with the quickest and easiest way to enter into SparkFun’s Qwiic ecosystem while still using that Raspberry Pi that you’ve come to know and love. The Qwiic pHAT connects the I2C bus (GND, 3.3V, SDA, and SCL) on your Raspberry Pi to an array of Qwiic connectors on the HAT. Since the Qwiic system allows for daisy-chaining boards with different addresses, you can stack as many sensors as you’d like to create a tower of sensing power!
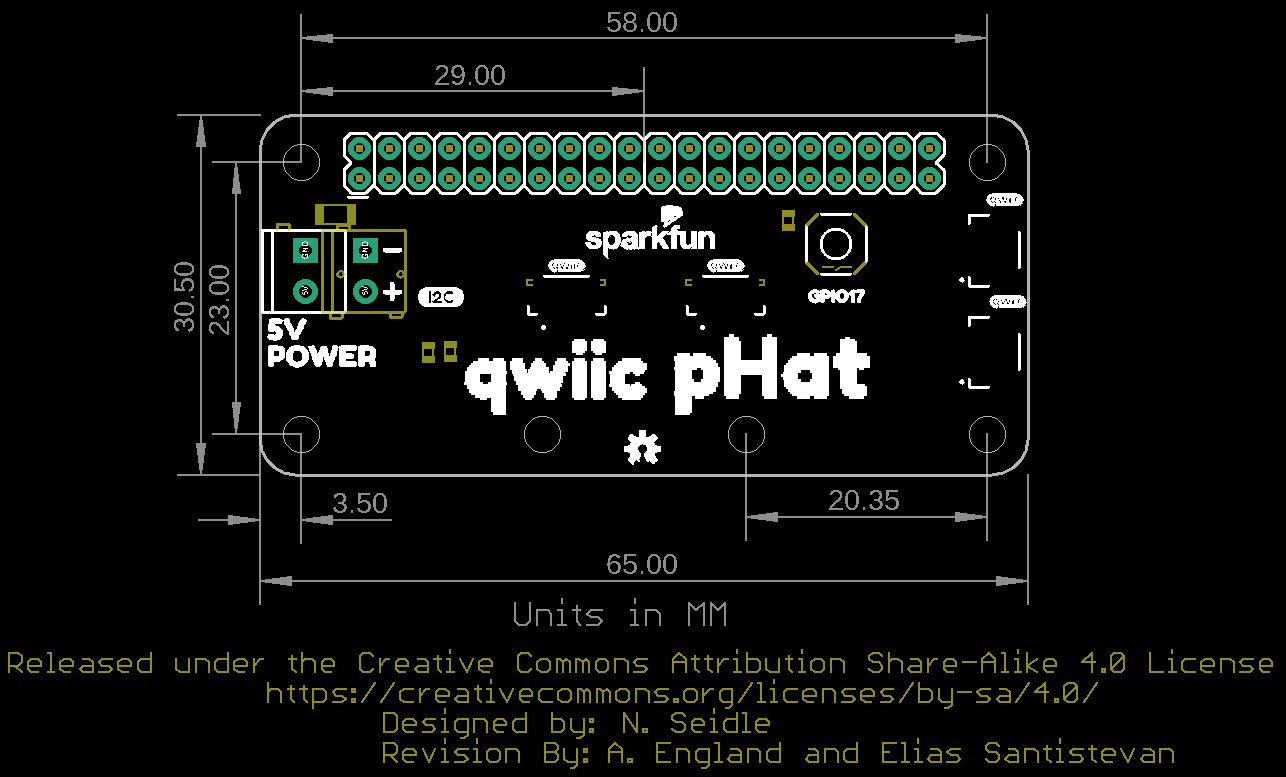
The Qwiic pHAT V2.0 has four Qwiic connect ports (two on its side and two vertical), all on the same I2C bus. We've also made sure to add a simple 5V screw terminal to power boards that may need more than 3.3V and a general-purpose button (with the option to shut down the Pi with a script). Also updated, the mounting holes found on the board are now spaced to accommodate the typical Qwiic board dimension of 1.0" x 1.0". This HAT is compatible with any Raspberry Pi that utilizes the standard 2x20 GPIO header as well as the NVIDIA Jetson Nano and Google Coral.
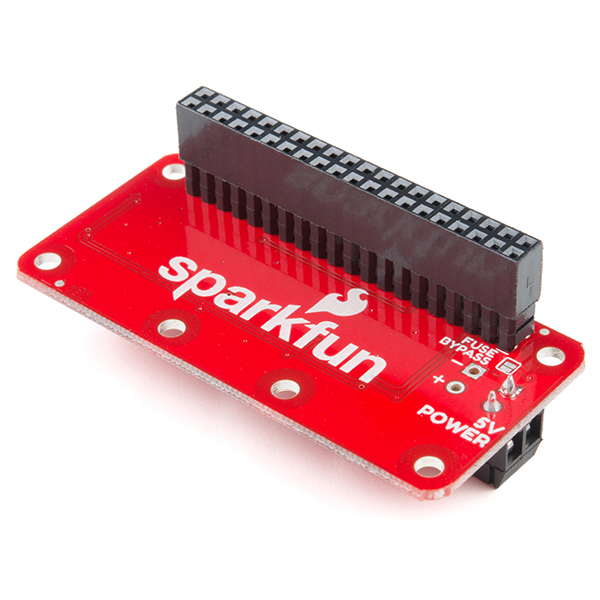
Note: When placing a Raspberry Pi and the pHAT in an enclosure (like the Pi Tin), we noticed that the pHAT was not fully inserted in Pi's header pins. For a secure connection, you'll need to add a pair of 1x20 stackable headers to extend the pins to your cart.
The SparkFun Qwiic Connect System is an ecosystem of I2C sensors, actuators, shields and cables that make prototyping faster and less prone to error. All Qwiic-enabled boards use a common 1mm pitch, 4-pin JST connector. This reduces the amount of required PCB space, and polarized connections mean you can’t hook it up wrong.
- 4x Qwiic Connection Ports
- 1x 5V Tolerant Screw Terminal
- 1x General Purpose Button
- HAT-compatible 40-pin Female Header
{kind=link}
SparkFun Qwiic pHAT v2.0 for Raspberry Pi Product Help and Resources
Raspberry Pi Safe Reboot and Shutdown Button
April 20, 2020
Safely reboot or shutdown your Raspberry Pi to avoid corrupting the microSD card using the built-in general purpose button on the Qwiic pHAT v2.0!
Qwiic pHAT for Raspberry Pi Hookup Guide
May 23, 2019
Get started interfacing your Qwiic enabled boards with your Raspberry Pi. The Qwiic pHAT connects the I2C bus (GND, 3.3V, SDA, and SCL) on your Raspberry Pi to an array of Qwiic connectors.
Qwiic Kit for Raspberry Pi V2 Hookup Guide
December 29, 2022
Get started with the SGP40, BME280, VCNL4040, and microOLED via I2C using the Qwiic system and Python on a Raspberry Pi! Measure VOC Index, light, temperature, humidity, and pressure from the environment. Then display them on the microOLED, serial terminal, or the cloud with Cayenne!
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
4.5 out of 5
Based on 2 ratings:
Good for prototyping w/o comittment
I got this board to supplement Sparkfun's sensor kit: https://www.sparkfun.com/products/16156 . I've been using it with the IMU sensor in the kit, and successfully polling data over I2C. It's nice to be able to plug in the sensor without any commitment to doing any soldering. I'm thinking about stacking it on top of a motor controller hat as a flexible way to add sensors. Another nice thing about having an IMU sensor connected via cable is the ability to wave it around without waving around the whole raspberry pi while testing.
Works as expected
From the get go, it is dependable.