- Home
- Product Categories
- Wheels
- Mecanum wheels - 4 pack





{kind=link}
Mecanum wheels - 4 pack
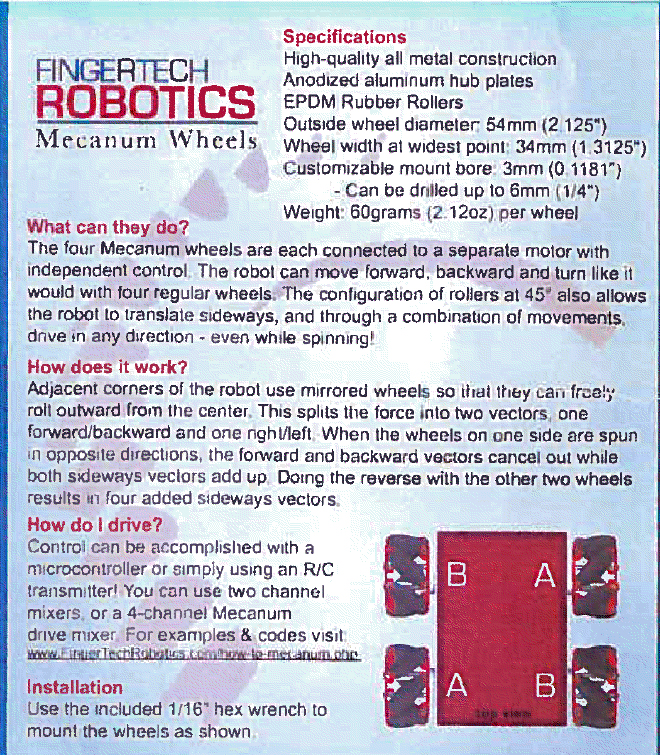
Mecanum wheels allow your robot to not only travel forward and backward, but also side to side. Using rollers set on a 45° rotational axis parallel to the main rotational axis of the wheel, it allows sideways movement as well as forward and backward movement!
These wheels are the updated version of Fingertech's original Mecanum wheels and they've made some awesome improvements. First of all, they moved to an all-metal aluminum design, making them more rugged. Secondly, the rollers are now supported on either side (instead of from the center) which reduces the friction from rollers rubbing against hubs. A small hex wrench is included with each wheel set to tighten the grub screw on the aluminum hub. These will mate directly with our micro gear motors but if you're using it with other motors you can easily drill out the hubs to accept larger shafts.
Notes: For the best performance, there a few things you should know. The wheels might need a little lubrication to get the rollers moving well enough for lateral movement. Some basic grease works well. Since lateral motion relies on the motors moving against each other, you will get the smoothest lateral movement when the wheels are traveling at the same speed. The use of encoders (or some feedback loop) is recommended. Lastly, making sure your robot platform is balanced helps tremendously as well. Too much weight in the front or back can cause poor results.
Weight: 60g per Wheel
Replaces: ROB-10543
- All Metal Construction
- Anodized Aluminum Hubplates
- EPDM Rubber Rollers
- Outside Wheel Diameter: 54mm
- Wheel Width at Widest Point: 34mm
- Mount Bore: 3mm (Can be drilled out to 6mm)
{kind=link}
Mecanum wheels - 4 pack Product Help and Resources
Core Skill: Robotics
This skill concerns mechanical and robotics knowledge. You may need to know how mechanical parts interact, how motors work, or how to use motor drivers and controllers.
Skill Level: Noob - You will be required to put together a robotics kit. Necessary parts are included and steps will be easy to follow. You also might encounter basic robotics components like bearings, mounts, or other hardware and need a general idea of how it goes together.
See all skill levels
Core Skill: DIY
Whether it's for assembling a kit, hacking an enclosure, or creating your own parts; the DIY skill is all about knowing how to use tools and the techniques associated with them.
Skill Level: Noob - Basic assembly is required. You may need to provide your own basic tools like a screwdriver, hammer or scissors. Power tools or custom parts are not required. Instructions will be included and easy to follow. Sewing may be required, but only with included patterns.
See all skill levels
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
5 out of 5
Based on 1 ratings:
These look like an improvement over the earlier version but they still look like they're not as nice as the Vex Mecanum wheels.
Rob is correct about encoder feedback being important. I'm using some Vex Mecanum on a Rover 5. Here's a video of it performing an autonomous figure 8. Encoder feedback is really important particularly when driving wheels at slow speeds.
The vex look a LOT like the older version of these...
The rubber rollers aren't removable on the Vex wheels. They feel like they have ball bearing inside. When I give a roller a flip with a finger it takes about 4.5 seconds for the spinning to stop (random roller on my bot that's over a year old).
The Vex are harder to mount on the Rover 5 than the FingerTech wheels. I have some instructions on how to mount them in post #28 of this thread.
Apparently the Vex wheels can be forced onto the Rover 5 without modifying the wheels at all. That's what Legomaniac did here.
I like these: http://www.andymark.com/product-p/am-0137.htm
I am having trouble understanding how to mount these wheels on a shaft. Can some one give me an idea what I need ? i.e. hub connector, shaft coupler, etc. from the picture all I see is 3mm hole for the shaft. If I can purchase those parts on here that be great.
The Actobotics hub mounts attach reasonably easily to these wheels. You'll want to get 1 inch actobotics standoffs to replace the existing standoffs with and some bolts to put it all together with. The upside is no need to drill out (and fix your size) for the original grub mount, the downside is probably around $7-12 per wheel depending on hub mount. Some pictures over here: http://monkeyiq.blogspot.com/2014/11/fingertech-mecanum-meets-actobotics.html
Would the hubs on these fit the servo hub on this page https://www.sparkfun.com/products/12274?
I want to use some mecanum wheels that could support at least 200 pounds between four of them. I want to motorize my office chair to zoom around the class and for short rides to the school office to get my mail. The only problem is I can only find mecanum wheels for small robots or forklifts. Does anyone know of a middle ground on this?
Sure I could do this with regular wheels, but everyone loves an overkill...
Try andymark, their motors (with gearboxes) and 8 inch mecanums are probably perfect for what you're describing. Be warned though, this will be VERY expensive.
For FRC i've spent $1000+ to make a mecanum chassis.
Has anyone tested these at high speeds?
Wow I never thought this time would come where wheels travel from side to side. Whoever invented this is a total genius! And I think it's way too expensive though. brake repair
I can attach these wheels perfectly on micro gear motors http://www.sparkfun.com/search/results?term=gearmotor+torque+micro&what=products ???
About VEX Mecanum Wheels, how do I attach them to a motor??
Thanks
The Vex wheels will likely be harder to mount than these. The Vex wheels have a square hole that needs to be drilled out to accept the shaft of the wheel you're using. I think the Vex wheels may be too large for the micro gear motors but they do work on the Rover 5.
You either need to drill the hole in the Vex wheel a little too small and use a fiction fit or drill them to the same size as the shaft and drill a hole through the side for a set screw. I have a link to some instructions in my other comment.
I'm pretty sure the Vex work better than these wheels (and are less expensive) but they will take more work to install (on non-Vex motors) than the FingerTech wheels. The Vex wheels are also larger than these wheels which may be a problem for some motors.
I personally like the looks of the Vex wheels, but I don't think they look as nice as these FingerTech wheels. Sometimes the big green Vex wheels will look out of place on a robot while these FingerTech wheels would look cool. We all know that "cool" is an important robot quality.
Vex only accepts purchases over 200$?
The $200 applies to purchase orders (a form schools and businesses use to purchase stuff). This doesn't apply to normal web orders.
If I buy VEX Wheels, Drive Shafts (What size should I buy?), Shaft Collars (right?), 2-Wire Motor 269... How do I attach the Whells and the Motors on my robot? I can't find brackets to attach the motor to the robot, like these: https://www.sparkfun.com/products/11278 to attach Mini Gear Motors.
Thanks in advance bro!
I've never used Vex motors or shafts. I'd suggest looking at YouTube videos and other places to see how others have mounted the motors and wheels.
I think Vex has a forum. You could ask there.
I need to understand how to attach vex wheels on any motor, e.g.: attach on mini gear motors (https://www.sparkfun.com/products/11278), I'm afraid to do something wrong if I drill the wheels
( sorry if my English is bad, I'm Brazilian :S )
If you're not using Vex wheels with Vex motors then you have to figure out a way to mount the wheels.
Here's another example of using Vex Mecanum wheels with a Rover 5.
I've also made custom hubs in order to use Vex omni-wheels with Dynamixel AX-12+ servos. See post #44 of this thread for a photo.
Sorry but the only way to make sure you don't do something wrong is not to do anything. And that's no fun.
Thanks for all the help! :)
Just one more thing, these mecanum wheels from FingerTech fits easily on Micro/Mini Gear Motors sold here in sparkfun?
Thanks a lot!!
I think it is way too expensive :(
It's made up for by the awesomeness :)
I have a question: The rollers are made on plastic or rubber? Making a omni-moving platform is easy and funny. If you need help or hints, just have a look here: http://arduinoomni.blogspot.com.es/2013/01/things-are-moving.html
EDPM rubber rollers. read the datasheet.
I have a set of the old version and I plan on buying these, but if the hubplates are anodized aluminum can I really drill them out?
It's hard to tell from the pictures, but I think they mean to drill out the milled aluminum HUB (the plain aluminum piece). The Anodized hub PLATES are the red pieces. I think you are getting the two confused. Correct me if I'm wrong.
Yeah, they're calling the star shaped wheel bit the "hub plate" and the hub itself is connected to that. The hub is soft aluminum and should drill easily.
I'm really nervous about drilling the holes off center. I plan on putting this on the rover 5 which has about 4mm shafts. Any advice?
I just popped a set onto a Rover 5. My best advice is step up to the size you need from just slightly larger than the existing hole. The bit will self-center in the hole so you don't have to worry too much about getting off-center.
I actually did it with a hand-drill (like a genius) and it worked out fine. Using the existing hole to center your bit should give you the results you're looking for.
What Nick said. It's nearly impossible to drill an off-center hole, when there's an existing hole already.