- Home
- Product Categories
- DC/Gearmotor
- Micro Gearmotor - 270 RPM (6-12V)



{kind=link}
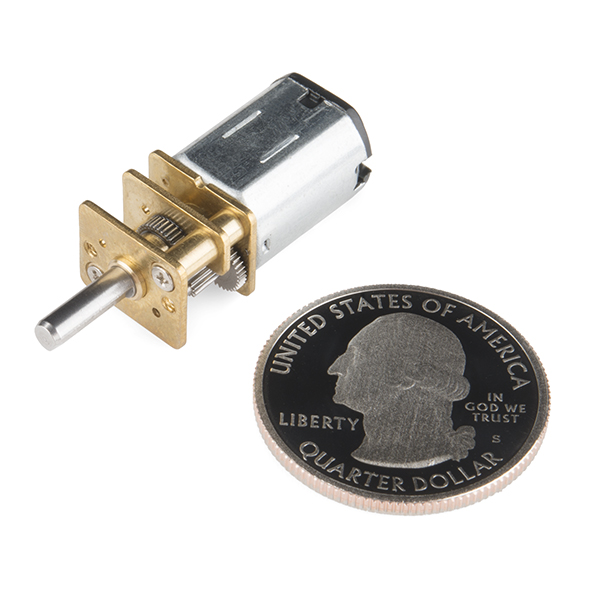
Micro Gearmotor - 270 RPM (6-12V)
These micro gearmotors are incredibly tough and feature full metal gears. They have a gear ratio of 100:1 and operate up to 12 volts and have a stall torque of 25 oz-in. and a max speed of 270 RPM. Each micro gearmotor sports a 3mm D-shaft.
Note: The micro gearmotor enclosures are sold separately, you can find them here.
- Voltage: 6 - 12 Volts
- Gear Ratio: 100:1
- Stall Torque: 12/25 oz-in. (6/12V)
- Speed: 140/270 RPM (6/12V)
- No Load Current: 40/80 mA (6/12V)
- Stall Current: 360/1600 mA (6/12V)
- DC Reversible* Motor Size: 26 x 12 x 10mm
- Shaft Size: 3mm Diameter x 10mm Length
- Weight: 17g
Micro Gearmotor - 270 RPM (6-12V) Product Help and Resources
Core Skill: Robotics
This skill concerns mechanical and robotics knowledge. You may need to know how mechanical parts interact, how motors work, or how to use motor drivers and controllers.
Skill Level: Rookie - You will be required to know some basics about motors, basic motor drivers and how simple robotic motion can be accomplished.
See all skill levels
Core Skill: Electrical Prototyping
If it requires power, you need to know how much, what all the pins do, and how to hook it up. You may need to reference datasheets, schematics, and know the ins and outs of electronics.
Skill Level: Noob - You don't need to reference a datasheet, but you will need to know basic power requirements.
See all skill levels
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
4 out of 5
Based on 1 ratings:
Using for prototype mechanism.
On first try we found there was plenty of torque for the application we are building.Will know more after the beta version is complete.
-------------------- Tech Support Tips/Troubleshooting/Common Issues --------------------
Extending the Shaft of the Microgear Motor
If you are looking for a way to extend the microgear motor's shaft to add an encoder, feel free to use the Shaft Coupler - 1/4" to 3mm [ https://www.sparkfun.com/products/12412 ]. You would just need to find a shaft length that is suitable for your project. Here's an example from ServoCity using a shaft coupler with a micro gearmotor => [ https://www.servocity.com/media/catalog/product/cache/1/image/438x280/602f0fa2c1f0d1ba5e241f914e856ff9/c/o/coupler_on_gearmotor_with_shafting.jpg ].
Can I get a Data Sheet for this motor?
I really could use a data sheet for shape and dimensions.
Is a drawing or model available for this family of parts?
Is this powerful enough to run a small robot?
You need to estimate the load to determine that...take some guesses, apply some physics. Have fun!
Hrm could you put up something on how to wire this sucker up?
As a general rule a DC motor only needs a power connection. Apply 6-12V to the motor (VCC to one pin and GND to the other) and it should spin. If you have any other questions feel free to email techsupport@sparkfun.com
Excellent!!! Simple!!! I love it! Thanks for the help!