- Home
- Product Categories
- 3-axis
- SparkFun RedBot Sensor - Accelerometer

{kind=link}
SparkFun RedBot Sensor - Accelerometer
The Accelerometer sensor is an add-on for your RedBot that provides bump and motion detection. The sensor works by measuring acceleration forces on the x, y, and z axis. By measuring the amount of acceleration (or lack there of) your robot can get a better understanding of its movements.
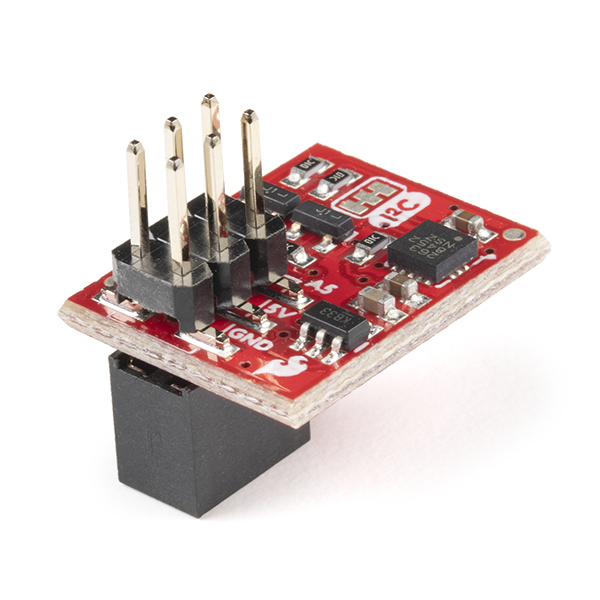
The sensor has two 2x3 headers (one male and one female) which connect directly to the RedBot Mainboard giving you the ability to stack another I2C sensor. Just use the included RedBot library to detect bumps and motion.
Check out the entire RedBot family of products!
- 5VDC Operating Voltage
- Triple Axis
- ±2g/±4g/±8g Selectable Full Scale
- 12 bits of resolution
- Orientation (Portrait/Landscape) Detection
- 0.45 x 0.69 " (11.53 x 17.72 mm)
- Schematic - v14
- Eagle Files - v14
- Datasheet (MMA8452Q)
- Quickstart Guide
- RedBot Experiment Guide
- RedBot Assembly Guide Rev 02
- GitHub
- Product Video
SparkFun RedBot Sensor - Accelerometer Product Help and Resources
MMA8452Q Accelerometer Breakout Hookup Guide
June 11, 2014
How to get started using the MMA8452Q 3-axis accelerometer -- a solid, digital, easy-to-use acceleration sensor.
Experiment Guide for RedBot with Shadow Chassis
May 28, 2015
This Experiment Guide offers nine experiments to get you started with the SparkFun RedBot. This guide is designed for those who are familiar with our SparkFun Inventor's Kit and want to take their robotics knowledge to the next level.
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
4.5 out of 5
Based on 2 ratings:
Does everything it is supposed to
I was able to remove the connectors as I needed through holes, and the circuit board held up well. Impressed.
Relative simple Accelerometer to use
Using the RedBot library as a start it was simple to get up and running for my application. The inclusion of a 5 v regulator and level shifting I2C signals made it especially easy to use. However, it would have been really nice if the accelerometer interrupt pins had been brought out. I understand this is meant for RedBot applications and the desire to make it simple was important, but it would have been a nice addition. There is another breakout for this chip that has all the signals brought out, but there is no I2C level shifting or regulator. I think the chip is at End Of Life so that's the way it goes. Nice job overall.
Small typo in the Documents. Next to the datasheet, it says the part number is MMA8462Q. I believe the part is MMA8452Q.
Am I correct that the pin alignment is X axis + and -, Y axis + and -, and Z axis + and -, or is it a different set-up? Wondering if I should buy or not.
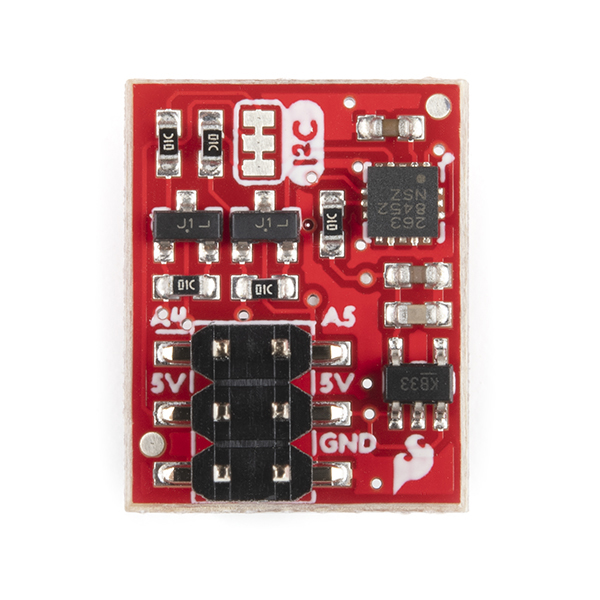
No, the pins are power, GND, SDA, and SCL. This is an I2C sensor that is designed to go with the Redbot kit. If you are not using the Redbot I would skip this and check out the other accelerometers we have. There are a few with different features and each should have some Arduino example code. If you have any other questions feel free to email techsupport@sparkfun.com
Why would this only be usable for Redbot? It's cheaper than other boards and, contrary to the other MMA8452Q breakout-board, it has a 3.3V-5V level shifter on board.
It is not that it is only usable for the Redbot, but it is designed specifically for the Redbot. If you don't need the voltage regulator and level shifting those parts will get in the way. Also, the headers are design for the Redbot, and are not breadboardable. If you aren't using the Redbot I just think it is probably easier to get the regular MMA8452Q breakout.
Thanks! Guess this won't work.
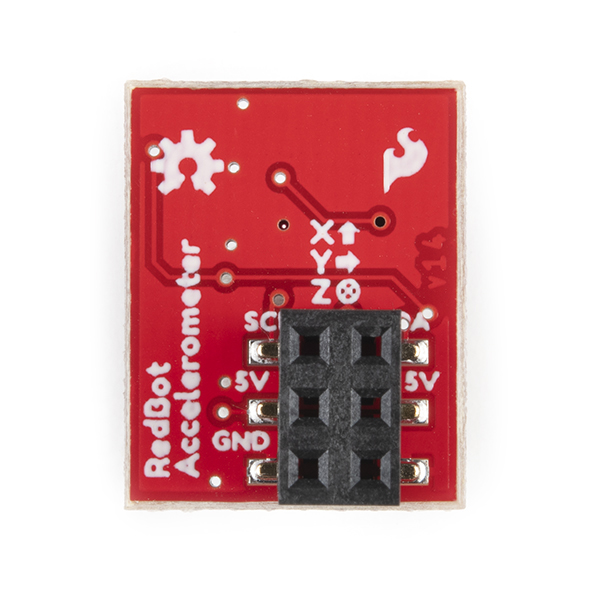
This picture shows it as it would be installed on the robot; the ball-caster end of the robot chassis would be toward the bottom of the image.
There are X, Y, and Z markings on the picture showing the orientation.
I'm actually talking about the pin output setup themselves. I am doing a project that needs directional sensing and figured this might be an affordable way to do that. My project has nothing to do with the RedBot
The link to the Arduino Library on this page doesn't work. It's accessible via the quickstart guide, though.