- Home
- Product Categories
- DC/Gearmotor Driver
- SparkFun Motor Driver - Dual TB6612FNG (with Headers)

{kind=link}
SparkFun Motor Driver - Dual TB6612FNG (with Headers)
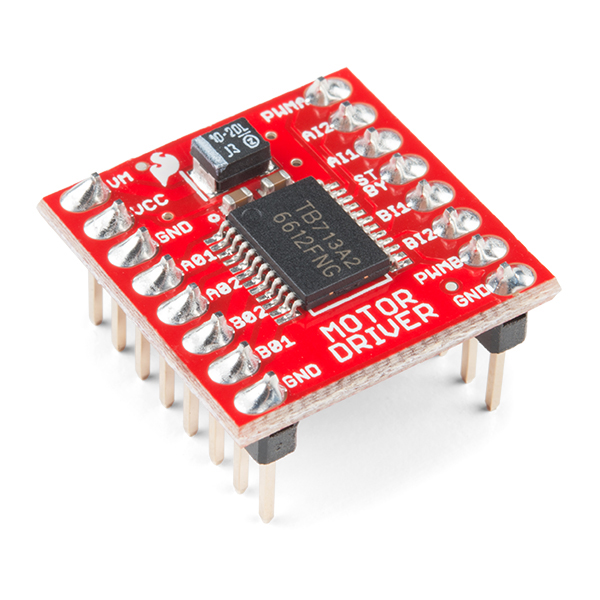
The TB6612FNG Motor Driver can control up to two DC motors at a constant current of 1.2A (3.2A peak). Two input signals (IN1 and IN2) can be used to control the motor in one of four function modes: CW, CCW, short-brake and stop. The two motor outputs (A and B) can be separately controlled, and the speed of each motor is controlled via a PWM input signal with a frequency up to 100kHz. The STBY pin should be pulled high to take the motor out of standby mode. Due to popular demand, this version of the SparkFun Motor Driver includes pre-soldered male headers for ease of use. With the headers already soldered on, you can jump right in to using this little board without any assembly!
Logic supply voltage (VCC) can be in the range of 2.7--5.5VDC, while the motor supply (VM) is limited to a maximum voltage of 15VDC. The output current is rated up to 1.2A per channel (or up to 3.2A for a short, single pulse).
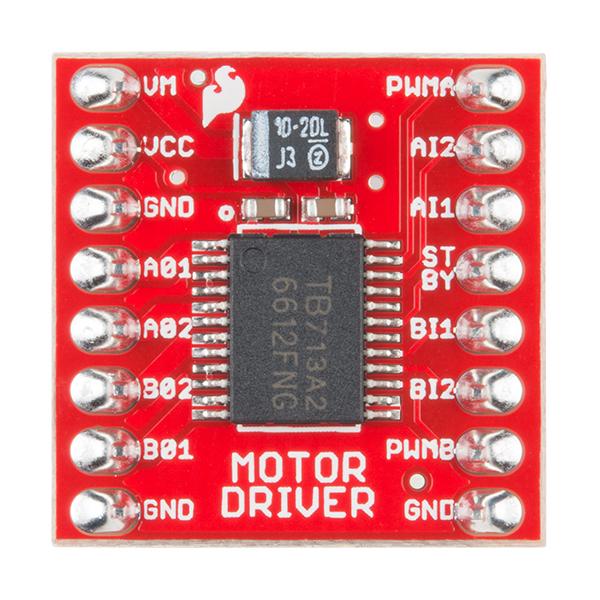
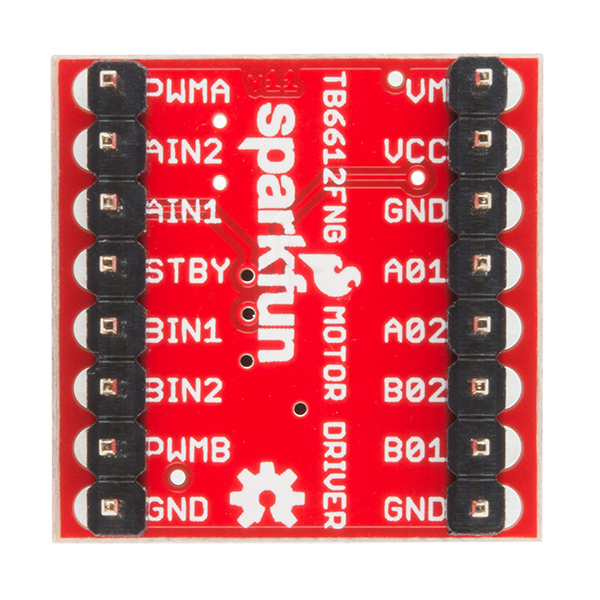
The board comes with all components installed as shown. Decoupling capacitors are included on both supply lines. All pins of the TB6612FNG are broken out to two 0.1" pitch headers; the pins are arranged such that input pins are on one side and output pins are on the other.
Note: If you are looking for the SparkFun Motor Driver without headers, it can be found here or in the Similar Products below.
- Power supply voltage: VM = 15V max, VCC = 2.7--5.5V
- Output current: Iout = 1.2A (average) / 3.2A (peak)
- Standby control to save power
- CW/CCW/short-brake/stop motor control modes
- Built-in thermal shutdown circuit and low-voltage detecting circuit
- All pins of the TB6612FNG broken out to 0.1" spaced pins
- Filtering capacitors on both supply lines
- Pre-soldered headers
- Schematic
- Eagle Files
- Hookup Guide
- Datasheet (TB6612FNG)
- GitHub (v1.1c)
SparkFun Motor Driver - Dual TB6612FNG (with Headers) Product Help and Resources
Light-Seeking Robot
November 28, 2017
We use parts from the SparkFun Inventor's Kit v4.0 to create a light-seeking robot that mimics the behavior of single-celled organisms.
ReconBot with the Tessel 2
October 13, 2016
Build a robot with the Tessel 2 that you can control from a browser on your phone or laptop.
Experiment Guide for the Johnny-Five Inventor's Kit
June 28, 2016
Use the Tessel 2 and the Johnny Five Inventors kit to explore the world of JavaScript enabled hardware through 14 awesome experiments!
Red Box Robot Hookup Guide
November 23, 2016
Turn an iconic SparkFun red box into an obstacle-avoiding robot.
SparkFun Inventor's Kit Experiment Guide - v4.0
November 15, 2017
The SparkFun Inventor's Kit (SIK) Experiment Guide contains all of the information needed to build all five projects, encompassing 16 circuits, in the latest version of the kit, v4.0a.
TB6612FNG Hookup Guide
September 29, 2016
Basic hookup guide for the TB6612FNG H-bridge motor driver to get your robot to start moving!
SparkFun Inventor's Kit Experiment Guide - v4.1
August 8, 2019
The SparkFun Inventor's Kit (SIK) Experiment Guide contains all of the information needed to build all five projects, encompassing 16 circuits, in the latest version of the kit, v4.1.2 and v4.1.
Core Skill: Robotics
This skill concerns mechanical and robotics knowledge. You may need to know how mechanical parts interact, how motors work, or how to use motor drivers and controllers.
Skill Level: Rookie - You will be required to know some basics about motors, basic motor drivers and how simple robotic motion can be accomplished.
See all skill levels
Core Skill: Programming
If a board needs code or communicates somehow, you're going to need to know how to program or interface with it. The programming skill is all about communication and code.
Skill Level: Rookie - You will need a better fundamental understand of what code is, and how it works. You will be using beginner-level software and development tools like Arduino. You will be dealing directly with code, but numerous examples and libraries are available. Sensors or shields will communicate with serial or TTL.
See all skill levels
Core Skill: Electrical Prototyping
If it requires power, you need to know how much, what all the pins do, and how to hook it up. You may need to reference datasheets, schematics, and know the ins and outs of electronics.
Skill Level: Rookie - You may be required to know a bit more about the component, such as orientation, or how to hook it up, in addition to power requirements. You will need to understand polarized components.
See all skill levels
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
4.7 out of 5
Based on 15 ratings:
2 of 2 found this helpful:
Worked well.
Worked as expected for powering small dc 6 motor with a fan attached. I'm new to this, but I was surprised how wide the speed range.
1 of 1 found this helpful:
TB6612FNG Motor Driver
Basically it is a very good driver and is easy to use as is.
Improvements to consider: Currently there is no way to mount the board short of double back tape. Four (4) small holes would be nice say big enough for # 2-56 screws
Added feature (option) 1.5 amps is nice for small motors. You might think about developing an add-on board or maybe another board to allow for the use of larger motors, say 5 amps or more.
The board I have I will use as is for the time being but I when I move on to a larger project, I will add a set of four (4) MOS FETs to allow me to drive much larger motors.
All in All, I like the board and will use it in my current project and will probably get another one along with some MOS FETS to increase the boards capacity.
Ken
Great
Great stuff
Great Product
While I know that my application was pretty close to the current limit for this product, the SparkFun Motor Driver has performed flawlessly. It was easy to interface with an Arduino Pro Mini and the coding was trivial. I am using these for prototypes of an electro-mechanical product that I am currently developing and will likely purchase several more as I continue to fabricate more prototypes. I will obviously transition away from this module for production...will probably still use the TB6612FNG IC.
Best Motor Driver
The TB6612FNG worked perfectly !
I was looking for some 3.3.V brush motor drivers. These worked great. What made them especially easy to use was the excellent driver library !!!. Thank you so very much for both the motor driver and library. Merry whatever you celebrate and have a very Happy New Year !!!
PS Mr robot also thanks you.
Works well with 37 mm diameter DC motors
I'm driving a couple of 37 mm diameter 12 V brushed DC motors with attached gearboxes on the bench with an Arduino clone. So far, so good.
I'd like to see a larger version of this board with some moderate-brightness indicator LEDs (especially on VM, VCC, and PWMA and PWMB) to make debugging and status checking easier. Of course this would make them more costly, but sometimes cost and size aren't as important as the ease of getting up and running.
Small but suprisingly powerful
I build robots. I have been using l298n motor drivers. But I just tried a TB6612FNG and it works just fine with 4 6 volt motors and a 12 volt 8xAA power source. My only problem was fitting all the dupont jumper connections onto the circuit prototype board. I will use the TB6612FNG from now on.
My project included one bidirectional motor and two solenoids. The motor driver worked great and the brake function was just what I needed. I had hoped to use the other two outputs for the two solenoids but the brake function seems to preclude this. It would be nice if the brake function could be disabled when not wanted.
Still, the motor driver is so inexpensive, so small and works so well for it's intended use that I bought two more. Great product!
On the channel you have your solenoid, try setting the A and B inputs low and PWM high and that shutoff the output and disable braking. :-)
Good little device
I'm glad I purchased the device with headers. Made it easy to pop into a breadboard. Controlling two motors with this unit was simple. Now if there would be a similar device to control 4 motors!
In my case, Vm is 6V, Vcc is 5V. Vcc is provided by an RPi4, and I use an external supply for the motors.
So far the device has been plugged-in for testing for at least 2 weeks straight, and shows no sign of any issues. My application is undergoing many tweaks, and therefore pretty continual testing of the motors.
Very happy with this so far.
Works great.
I've been using it to drive a ST-PM35-15-11C stepping motor without issue. The chip is made by Toshiba and I felt Toshiba's documentation could have more information, like a diagram of the control logic.
Easiest way to control your robot
I teach a robotics class for high school students, and I'm always looking for an easy way to teach the students how to control the motors on their robots. The SparkFun motor driver is one of the best TB6612 motor controllers I've found. It can be put right into a breadboard and the documentation online shows students all the pin locations they need to hook up to an Arduino or even a microbit.
Best Motor Driver I Have Ever Used
This may not be the "Best Thing" I have ever owned but as a motor driver, it's pretty darn good. First, it's a great size, smaller than any other motor driver I've used. Second, it's range of voltages and temperatures is well beyond my needs for small motors. I love playing with this stuff and I will probably order more in the futures.