- Home
- Product Categories
- Wireless Kits
- SparkFun GPS-RTK-SMA Kit














{kind=link}
SparkFun GPS-RTK-SMA Kit
The SparkFun GPS-RTK-SMA Kit comes with just what you need to get started using u-blox's ZED-F9P and GPS Real Time Kinematics. With GPS you are able to know where you are, where you're going, and how to get there anywhere on Earth within 30 seconds. This means the higher the accuracy the better! GPS Real Time Kinematics (RTK) has mastered dialing in the accuracy of their GPS modules to just millimeters, and that's why we had to put it on this kit!
Based on the SparkFun GPS-RTK2 designs, the SparkFun GPS-RTK-SMA raises the bar for high-precision GPS and is the latest in a line of powerful RTK boards featuring the ZED-F9P module from u-blox. The ZED-F9P is a top-of-the-line module for high accuracy GNSS and GPS location solutions including RTK that is capable of 10mm, three-dimensional accuracy. With this board, you will be able to know where your (or any object's) X, Y, and Z location is within roughly the width of your fingernail! The ZED-F9P is unique in that it is capable of both rover and base station operations. Utilizing our handy Qwiic system, no soldering is required to connect it to the rest of your system. However, we still have broken out 0.1"-spaced pins in case you prefer to use a breadboard.
We've included a rechargeable backup battery to keep the latest module configuration and satellite data available for up to two weeks. This battery helps 'warm-start' the module decreasing the time-to-first-fix dramatically. This module features a survey-in mode allowing the module to become a base station and produce RTCM 3.x correction data. Based on your feedback, we switched out the U.FL connector and included an SMA connector in this version of the board.
The number of configuration options of the ZED-F9P is incredible! Geofencing, variable I2C address, variable update rates, even the high precision RTK solution can be increased to 20Hz. The GPS-RTK2 even has five communications ports which are all active simultaneously: USB-C (which enumerates as a COM port), UART1 (with 3.3V TTL), UART2 for RTCM reception (with 3.3V TTL), I2C (via the two Qwiic connectors or broken out pins), and SPI.
We've written an extensive Arduino library for u-blox modules to make reading and controlling the GPS-RTK-SMA over our Qwiic Connect System easy. Leave NMEA behind! Start using a much lighter weight binary interface and give your microcontroller (and its one serial port) a break. The SparkFun Arduino library shows how to read latitude, longitude, even heading and speed over I2C without the need for constant serial polling.
Also included in this kit is the GNSS multiband antenna, ground plate, and a reversible USB-A to C cable. The included antenna features a magnetic base and is designed to receive both the classic L1 and L2 GPS bands. Meanwhile, the ground plate will significantly increase the performance of the included antenna!
The SparkFun Qwiic Connect System is an ecosystem of I2C sensors, actuators, shields and cables that make prototyping faster and less prone to error. All Qwiic-enabled boards use a common 1mm pitch, 4-pin JST connector. This reduces the amount of required PCB space, and polarized connections mean you can’t hook it up wrong.
GPS-RTK-SMA Breakout - ZED-F9P:
- Concurrent reception of GPS, GLONASS, Galileo and BeiDou
- Receives both L1C/A and L2C bands
- Voltage: 5V or 3.3V but all logic is 3.3V
- Current: 68mA - 130mA (varies with constellations and tracking state)
- Time to First Fix: 25s (cold), 2s (hot)
- Max Navigation Rate:
- PVT (basic location over UBX binary protocol) - 25Hz
- RTK - 20Hz
- Raw - 25Hz
- Horizontal Position Accuracy:
- 2.5m without RTK
- 0.010m with RTK
- Max Altitude: 50km (31 miles)
- Max Velocity: 500m/s (1118mph)
- Weight: 6.8g
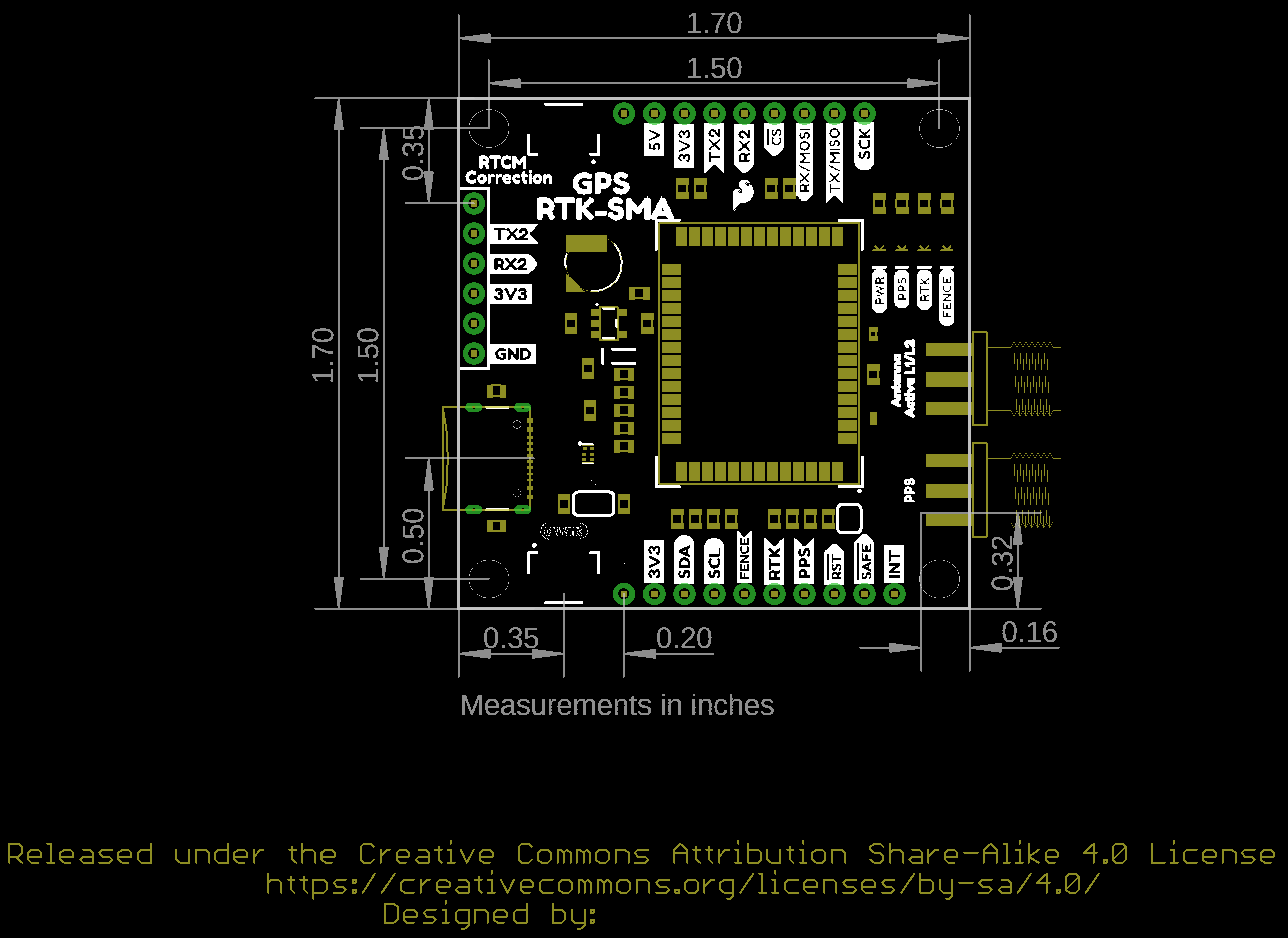
- Dimensions: 43.5mm x 43.2mm (1.71in x 1.7in)
- 2x Qwiic Connectors
Antenna:
- Frequency:
- L1 Band: 1559-1606MHz
- L2/L5 Band: 1197-1249MHz
- Peak gain (over 15cm diameter ground plane):
- L1 Band: 3.5dBic
- L2/L5 Band: 0-2.0dBic
- VSWR: max. 2
- Bandwidth: min. 200MHz
- Impedance: 50 Ohm
- Polarization RHCP
- Supports GPS, GLONASS, Galileo, and BeiDou
- 5m coaxial cable with SMA connector
- Magnetic base, fixed installation option (screw mount, 2 x M4 screws)
- Dimensions: 60.0mm x 82.0mm x 22.5mm
- Weight: 175g (including cable)
- Frequency:
Ground Plate:
- Diameter: 4 Inches
- Thickness: 1/16"
- Weight: 0.4211 lbs
- Center Thread: 1/4-20 UNC Thread
- Finish: Industrial
USB Cable:
- Reversible USB-A connector
- Reversible USB-C connector
- 0.8 meter cable length
GPS-RTK-SMA Breakout - ZED-F9P:
- Schematic
- Eagle Files
- Mounting Holes and Dimension
- Hookup Guide
- Datasheet (ZED-F9P)
- UBX and NMEA Protocol Manual (ZED-F9P)
- Integration Manual (ZED-F9P)
- Product Summary (ZED-F9P)
- Release Notes - FW1.00 (ZED-F9P)
- Example RTCM output from the ZED-F9P
- u-blox ECCN
- Arduino Library
- GitHub
Antenna:
- Datasheet (ANN-MB-00)
- Product Summary
Ground Plate:
USB Cable:
{kind=link}
SparkFun GPS-RTK-SMA Kit Product Help and Resources
What is GPS RTK?
September 14, 2018
Learn about the latest generation of GPS and GNSS receivers to get 14mm positional accuracy!
How to Build a DIY GNSS Reference Station
October 15, 2020
Learn how to affix a GNSS antenna, use PPP to get its ECEF coordinates and then broadcast your own RTCM data over the internet and cellular using NTRIP to increase rover reception to 10km!
Setting up a Rover Base RTK System
October 14, 2020
Getting GNSS RTCM correction data from a base to a rover is easy with a serial telemetry radio! We'll show you how to get your high precision RTK GNSS system setup and running.
Getting Started with u-blox Thingstream and PointPerfect
January 23, 2023
Interested in high precision GNSS without setting up a base station?
GNSS Correction Data Receiver (NEO-D9S) Hookup Guide
October 27, 2022
Add GNSS correction data to your high precision GNSS (HPG) receiver with the u-blox NEO-D9S! This tutorial will get you started with the ZED-F9P, NEO-D9S, and the ESP32 IoT RedBoard.
Getting Started with U-Center for u-blox
September 13, 2018
Learn the tips and tricks to use the u-blox software tool to configure your GPS receiver.
GPS-RTK2 Hookup Guide
January 14, 2019
Get precision down to the diameter of a dime with the new ZED-F9P from u-blox.
Core Skill: Programming
If a board needs code or communicates somehow, you're going to need to know how to program or interface with it. The programming skill is all about communication and code.
Skill Level: Competent - The toolchain for programming is a bit more complex and will examples may not be explicitly provided for you. You will be required to have a fundamental knowledge of programming and be required to provide your own code. You may need to modify existing libraries or code to work with your specific hardware. Sensor and hardware interfaces will be SPI or I2C.
See all skill levels
Core Skill: Electrical Prototyping
If it requires power, you need to know how much, what all the pins do, and how to hook it up. You may need to reference datasheets, schematics, and know the ins and outs of electronics.
Skill Level: Rookie - You may be required to know a bit more about the component, such as orientation, or how to hook it up, in addition to power requirements. You will need to understand polarized components.
See all skill levels
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
4.2 out of 5
Based on 5 ratings:
1 of 1 found this helpful:
1st step to an autonomous mower
This is an awesome package, and my first step to building an autonomous mower. I will eventually buy another (base station plus mobile platform), but wanted to see how this was to start with out of the box. As Sparkfun videos indicate, this is a complicated device with many, many settings. Nevertheless, I was able to quickly get it running tracking satellites and reporting my position. Broadcasting correction data will be my next step. Again, the Sparkfun videos are very helpful, and I am looking forward to my project build.
Easy to use, works as advertized.
Simple as: works well with minimal setup, produces good data, what more could you ask for?
Disappointed.
Never achieved Accuracy under 7ft.. worst after the firmware update. Followed all instructions and setting configuration to the tee, and nothing. Open yard, no obstructions no interference. Currently a paperweight.
Great, as advertised.
I followed the tutorials and had a RTK fix within 5 minutes. Great product. My Bluetooth unit runs at 4800 baud, not 38k. That was my only hiccup. Once sorted, everything else fell into place. Now it's going into a bathymetric boat to work.
The State of Minnesota offers free RTK correction data. They have base station throughout the State. Their system will look at the closest base stations to me and create a virtual base station at my location. However when I try too connect I get an error. They tell me my problem is with the configuration of my receiver. I'm stuck.