- Home
- Product Categories
- GPS Boards
- SparkFun GPS-RTK-SMA Breakout - ZED-F9P (Qwiic)






{kind=link}
With GPS you are able to know where you are, where you're going, and how to get there anywhere on Earth within 30 seconds. This means the higher the accuracy the better! GPS Real Time Kinematics (RTK) has mastered dialing in the accuracy of their GPS modules to just millimeters, and that's why we had to put it on this board!
Based on the SparkFun GPS-RTK2 designs, the SparkFun GPS-RTK-SMA raises the bar for high-precision GPS and is the latest in a line of powerful RTK boards featuring the ZED-F9P module from u-blox. The ZED-F9P is a top-of-the-line module for high accuracy GNSS and GPS location solutions including RTK that is capable of 10mm, three-dimensional accuracy. With this board, you will be able to know where your (or any object's) X, Y, and Z location is within roughly the width of your fingernail! The ZED-F9P is unique in that it is capable of both rover and base station operations. Utilizing our handy Qwiic system, no soldering is required to connect it to the rest of your system. However, we still have broken out 0.1"-spaced pins in case you prefer to use a breadboard.
We've included a rechargeable backup battery to keep the latest module configuration and satellite data available for up to two weeks. This battery helps 'warm-start' the module decreasing the time-to-first-fix dramatically. This module features a survey-in mode allowing the module to become a base station and produce RTCM 3.x correction data. Based on your feedback, we switched out the u.FL connector and included an SMA connector in this version of the board.
The number of configuration options of the ZED-F9P is incredible! Geofencing, variable I2C address, variable update rates, even the high precision RTK solution can be increased to 20Hz. The GPS-RTK2 even has five communications ports which are all active simultaneously: USB-C (which enumerates as a COM port), UART1 (with 3.3V TTL), UART2 for RTCM reception (with 3.3V TTL), I2C (via the two Qwiic connectors or broken out pins), and SPI.
We've also written an extensive Arduino library for u-blox modules to make reading and controlling the GPS-RTK-SMA over our Qwiic Connect System easy. Leave NMEA behind! Start using a much lighter weight binary interface and give your microcontroller (and its one serial port) a break. The SparkFun Arduino library shows how to read latitude, longitude, even heading and speed over I2C without the need for constant serial polling.
The SparkFun Qwiic Connect System is an ecosystem of I2C sensors, actuators, shields and cables that make prototyping faster and less prone to error. All Qwiic-enabled boards use a common 1mm pitch, 4-pin JST connector. This reduces the amount of required PCB space, and polarized connections mean you can’t hook it up wrong.
- This product is compatible with u-blox® PointPerfect & includes a redemption code for 1-month of unlimted access for a single device. Take your precision to the next level with the PointPerfect GNSS augmentation service.
- Concurrent reception of GPS, GLONASS, Galileo and BeiDou
- Receives both L1C/A and L2C bands
- Voltage: 5V or 3.3V but all logic is 3.3V
- Current: 68mA - 130mA (varies with constellations and tracking state)
- Time to First Fix: 25s (cold), 2s (hot)
- Max Navigation Rate:
- PVT (basic location over UBX binary protocol) - 25Hz
- RTK - 20Hz
- Raw - 25Hz
- Horizontal Position Accuracy:
- 2.5m without RTK
- 0.010m with RTK
- Max Altitude: 50km (31 miles)
- Max Velocity: 500m/s (1118mph)
- Weight: 6.8g
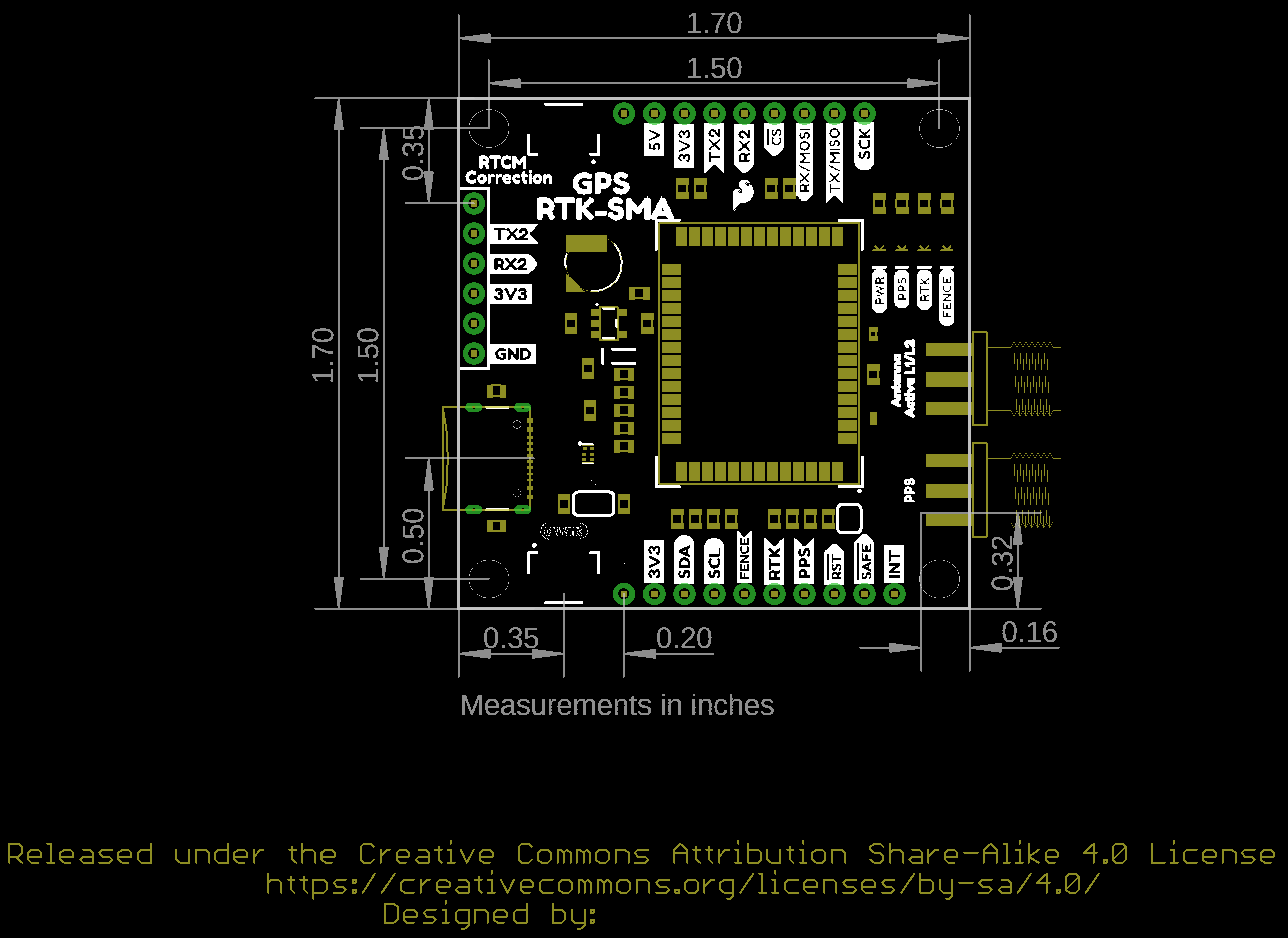
- Dimensions: 43.5mm x 43.2mm (1.71in x 1.7in)
- 2x Qwiic Connectors
- Schematic
- Eagle Files
- Mounting Holes and Dimension
- Hookup Guide
- Datasheet (ZED-F9P)
- UBX and NMEA Protocol Manual (ZED-F9P)
- Integration Manual (ZED-F9P)
- Product Summary (ZED-F9P)
- Release Notes - FW1.00 (ZED-F9P)
- Example RTCM output from the ZED-F9P
- u-blox ECCN
- Arduino Library - v3
- GitHub
{kind=link}
SparkFun GPS-RTK-SMA Breakout - ZED-F9P (Qwiic) Product Help and Resources
What is GPS RTK?
September 14, 2018
Learn about the latest generation of GPS and GNSS receivers to get 14mm positional accuracy!
How to Build a DIY GNSS Reference Station
October 15, 2020
Learn how to affix a GNSS antenna, use PPP to get its ECEF coordinates and then broadcast your own RTCM data over the internet and cellular using NTRIP to increase rover reception to 10km!
Setting up a Rover Base RTK System
October 14, 2020
Getting GNSS RTCM correction data from a base to a rover is easy with a serial telemetry radio! We'll show you how to get your high precision RTK GNSS system setup and running.
Getting Started with u-blox Thingstream and PointPerfect
January 23, 2023
Interested in high precision GNSS without setting up a base station?
How to Upgrade Firmware of a u-blox GNSS Receiver
March 26, 2021
A few steps and you'll upgrade to the latest features on a u-blox GNSS receiver.
Getting Started with U-Center for u-blox
September 13, 2018
Learn the tips and tricks to use the u-blox software tool to configure your GPS receiver.
GPS-RTK2 Hookup Guide
January 14, 2019
Get precision down to the diameter of a dime with the new ZED-F9P from u-blox.
Core Skill: Programming
If a board needs code or communicates somehow, you're going to need to know how to program or interface with it. The programming skill is all about communication and code.
Skill Level: Competent - The toolchain for programming is a bit more complex and will examples may not be explicitly provided for you. You will be required to have a fundamental knowledge of programming and be required to provide your own code. You may need to modify existing libraries or code to work with your specific hardware. Sensor and hardware interfaces will be SPI or I2C.
See all skill levels
Core Skill: Electrical Prototyping
If it requires power, you need to know how much, what all the pins do, and how to hook it up. You may need to reference datasheets, schematics, and know the ins and outs of electronics.
Skill Level: Rookie - You may be required to know a bit more about the component, such as orientation, or how to hook it up, in addition to power requirements. You will need to understand polarized components.
See all skill levels
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
4.6 out of 5
Based on 18 ratings:
1 of 1 found this helpful:
GPS-RTK-SMA Breakout - ZED-F9P (Qwiic)
We bought two of this and one is not working. It cannot connect device to USB port. We have emailed the support team and still waiting for your response. We also want to order two more of the same but prefer to wait for your positive response.
1 of 1 found this helpful:
Easy to set up, good documentation - also look at F9R variety for rover!
I used the pair of these boards (F9P, SMA) to set up a base station and provide my rover with precise positioning information. The base station has dish antenna, long cable, a HolyBro telemetry radio and an ESP32 NTRIP server. The rover has matching telemetry radio, smaller antenna, and GPS is connected to onboard Raspberry Pi 3 via USB cable. Big kudos for SparkFun for providing example NTRIP server for ESP32 GNSS Library. It is a good starting point, although it must be modified to handle connectivity interrupts etc. I learned a lot from SparkFun documentation and deepsouthrobotics.com videos. Overall, I am very happy with these boards - they are well made, easy to setup and are worth every penny. For the rover the F9R variety seems to be a better fit, which should probably be mentioned in the web pages. My project album is here: https://photos.app.goo.gl/jwYZRtTi1LVshQoW8
1 of 1 found this helpful:
SMA connector sturdy!
SMA connector is very sturdy; thank you SFE engineers for releasing this version of the board. Works great, TTFF 30-45 seconds, tracking 27 satellites indoors with 100-150 PDOP. Updates at 10 Hz easily, very high quality module.
Works as it should. (That is, works great!)
Really nice breakout board for industry-leading receiver. Tested it in RTK mode via u-center, works good, centimeter-level precision is evident.
P. S. Do not forget that you want multi-band GNSS antenna, like u-blox https://www.sparkfun.com/products/15192 for $65. The cheapest antenna for $10 can work but will limit the receiver potential.
Amazing module!
It was really easy to configure an start receiven RTCM messages at my USB port. I recommend it!
very good product
I wanted to know if I can connect a gnss antenna from leica with the following features on the ZED-F9P (Qwiic) using a tnc to sma adapter.
Hi there! if you have questions, please see our technical assistance page for information on how to contact our support department.
1cm location accuracy on the first try
The board worked as advertised. It took a little bit of time to work through the command structure and get the device into the right state, but once it was there, it was able to lock on a global position with ~1m accuracy within about 60 seconds and provide 1cm relative location accuracy for a second board. I opted not to use the Arduino libraries as I want to control the board directly for my application (using STM32 boards). Documentation for direct access and control is a little sparse.
This GPS receiver works great!
I purchased this receiver to implement some precision farming software I wrote for a Raspberry Pi. I am pulling RTK correction data off of my state's DOT-ran correction network through my cell phone hotspot, and it works fantastic. I usually get a RTK fix in 5 minutes or less, and RTK float almost immediately on power-up. I haven't quantified the accuracy of this product, but anecdotally, it seems to be pretty spot-on. The Sparkfun tutorial on this product is really good to get going, but be prepared to spend some time tinkering in U-center to get everything set like you want. I purchased a cheapie antenna instead of the u-blox antenna, with the idea that if it wasn't reliable with the cheap antenna, I would splurge on the u-blox antenna. However, I have not had any issues with my cheap antenna, so I would recommend starting with a cheap antenna and only upgrading if you are having issues. Get the SMA version! I end up connecting and disconnecting the antenna a lot to move my device in and out of the tractor, and it is nice to not worry as much about damaging the connector.
Agricultural Base Station
Got this and ESP32. Already have RTK Express. Rereading How to Build a DIY GNSS Reference Station again. Looks doable. Already marked my orchard with RTK Express and plotted the points on Google Earth and wrote a little code around it. Now want to take it to the next level. Also saw some useful things in the comments.
Great GPS
Arrived quickly and working well. Looks like it will be a good base station.
Never received
I am sure it will be great but I never recieved this product.
Worse FedEx thinks they delivered.
Great dev tool
This is a great tool and it works really well!
Make my job very eazy
Thanks for packaging and fast delivery.
Works great!
Unit works well. Take care with programming and the RTK feature. Could be a little better information however it works great once you get it all dialed in.
0 of 1 found this helpful:
Works great
Easy to use and program. Works great with the right add ons.
an amazing product
the accuracy of this little board is amazing.
0 of 1 found this helpful:
a nice product with fast shipping
The product looks nice and works as my expectation. Thanks Sparkfun!
0 of 1 found this helpful:
Lots of potential!
This is a follow up review to the first written around half a year ago (mid 2020) which has proven to worthwhile despite the numerous challenges encountered during the beginning. First, be aware that a technical deep dive is a requisite to unlock the full potential of the GPS; till now I don't understand all the aspects and acronyms fully after extensive experimentation and reading up, but eventually you can piece together enough information to make it work. Best part about the breakout is the number of interfaces. Using the breakout for both a caster and rover configuration, each serving their roles as desired, whether it's I2C or USB type C. The tutorials provide a good head start to get you on your feet, be sure to follow every single detail to the have a working configuration as well as a quality antenna with a clear view of the sky
I've gone to the extent of writing up my detailed experience of the hardware in the form of a HardwareX article (https://doi.org/10.1016/j.ohx.2021.e00203) which is freely available to anyone to read (open access) which I hope will assist others with using the hardware for innovative projects. Some quantitative evaluation of the accuracy is also included. This forms a significant portion in the successful execution of my PhD research project which I hope to finish this year (2021) - thanks SparkFun for continuing to provide an extensive range of fantastic products!
Hi - I've written the first part of a tutorial series that may help you. The first focuses on setting up a rover base system. The second focuses on building your own GNSS reference station and should show you everything you need to setup NTRIP on RTK2GO. If you find it helpful, please consider modifying your review. They mean a great deal to us.
Great to see this board with an SMA connector! I've been constantly worrying about damaging the u.Fl connector on the GPS-RTK2 board over the past several months.
It's important to note that the power consumption value of ~35 mA is not correct.
The actual power consumption, as listed in the ZED-F9P datasheet, ranges between 68-130 mA. Both the GPS-RTK2 and GPS-RTK-SMA product pages should be updated to reflect this.
Nice catch. I think it's an artifact from the first RTK's product page that was released. Both have been updated to reflect the datasheet. =)
Wow- Another exciting RTK product. Ever since I relocated to eastern Washington I lost the use of the (at the time of purchase) expensive DGPS receiver I was running on my robots.
These RTK-capable boards are great, but for me there is one rub- how to get the base station DGPS correction data out into the field at least 1000 feet or so for roving robots? I am sure beyond a doubt that SF carries the necessary components in-stock; either by way of radio, Xbee or such, but I fear I would get lost in the integration of these components. I once made a successful XBee-toXbee connection between two GPS boards , but I could not go beyond the default settings the units came with and was unable to configure multiple receivers (due to my own ineptitude surely).
If SF offered a four-component kitted RTK package specifically for roving applications that included: Two of these RTK boards, and two QWIIC-capable radios which would not degrade the GPS signal, along with the associated connectors and hardware, (and Arduino libraries), I know I would have immediate need for at least two of them- I suspect others might as well.
A better and perhaps more cost-effective product might be to integrate the radio onto an RTK GPS board which could then be configured for base or rover operation. The whole point behind RTK is assuming one would have a base station at some known fixed location and a roving unit moving about in the field- so why shouldn't the units have a radio integrated into them?
Great product suitable for almost any RTK/GPS application. Works perfectly using the 'P' (black) U-Center app. 10 cm fix immediately after configuration - follow the outstanding Sparkfun tutorials.
Hello, I am the happy owner of the GPS-RTK2 Board-ZED-F9P and SparkFun Thing Plus - ESP32 WROOM modules. I combined them with a simple and great Qwiic Connect System. I made one of the simplest base stations that is described in the base station manual. Such miracles can of course be done thanks to your Arduino library for u-blox modules. Everything works beautifully, the corrections reach the caster and then the rover, and everything is measured to the centimeter, I checked around the house and 10 km from it :). The Arduino library, thanks to a great programmer Paul, (explained on Github), was able to be modified so that the modules work outside the computer on a powerbank or battery. This solution allows you to use the base station, among others at coordinate points, on the geodesic matrix, somewhere outside the house in the field. This technology of achieving GNSS accuracy is amazing.
Hello, i have a question. Am i wrong or the only difference between this module and the "GPS-RTK2 Board - ZED-F9P (Qwiic)" module is the type of connection? The one being U.FL and the other SMA? Also, if i use more than one of them as a base station is the accuracy going to be better?