- Home
- Product Categories
- Wireless and IoT Antennas
- SparkFun GPS-RTK Dead Reckoning Kit













{kind=link}
SparkFun GPS-RTK Dead Reckoning Kit
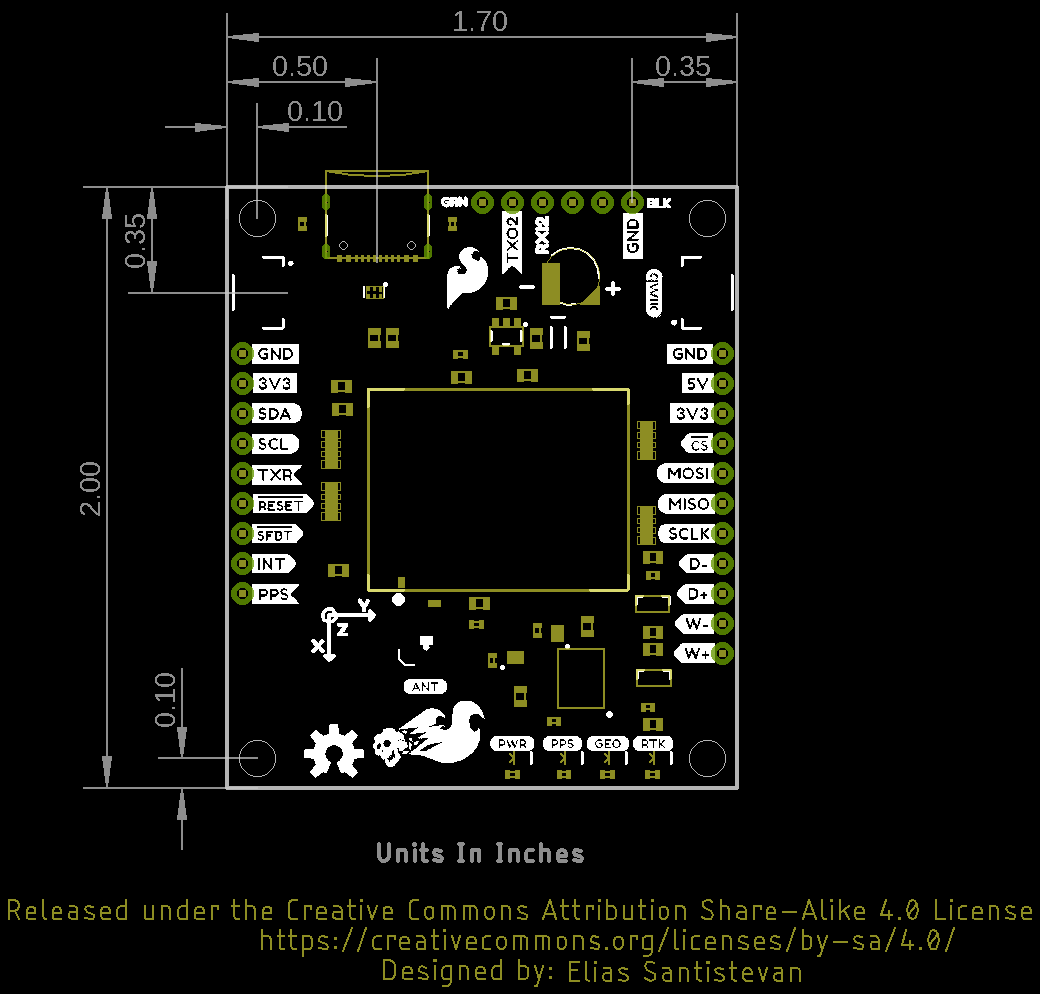
The SparkFun GPS-RTK Dead Reckoning Kit gives exactly what you need to get started using u-blox's ZED-F9R and GPS Real Time Kinematics. The SparkFun ZED-F9R GPS Breakout is a high precision, sensor fusion GPS board with equally impressive configuration options and takes advantage of u-blox's Automotive Dead Reckoning (ADR) technology. The ZED-F9R module provides a highly accurate and continuous position by fusing a 3D IMU sensor, wheel ticks, a vehicle dynamics model, correction data, and GNSS measurements.
The ZED-F9R module is a 184-channel u-blox F9 engine GNSS receiver, meaning it can receive signals from the GPS, GLONASS, Galileo, and BeiDou constellations with ~0.2 meter accuracy! That's right, such accuracy can be achieved with an RTK navigation solution when used with a correction source. Note that the ZED-F9R can only operate as a rover, so you will need to connect to a base station. The module supports concurrent reception of four GNSS systems. The combination of GNSS and integrated 3D sensor measurements on the ZED-F9R provide accurate, real-time positioning rates of up to 30Hz.
Compared to other GPS modules, this breakout maximizes position accuracy in dense cities or covered areas. Even under poor signal conditions, continuous positioning is provided in urban environments and is also available during complete signal loss (e.g. short tunnels and parking garages). The ZED-F9R is the ultimate solution for autonomous robotic applications that require accurate positioning under challenging conditions.
Additionally, this u-blox receiver supports I2C (u-blox calls this Display Data Channel) which makes it perfect for the Qwiic compatibility so we don't have to use up our precious UART ports. Utilizing our handy Qwiic system, no soldering is required to connect it to the rest of your system. However, we still have broken out 0.1"-spaced pins in case you prefer to use a breadboard.
U-blox based GPS products are configurable using the popular, but dense, windows program called u-center. Plenty of different functions can be configured on the ZED-F9R: baud rates, update rates, geofencing, spoofing detection, external interrupts, SBAS/D-GPS, etc. All of this can be done within the SparkFun Arduino Library!
The SparkFun ZED-F9R GPS Breakout is also equipped with an on-board rechargeable battery that provides power to the RTC on the ZED-F9R. This reduces the time-to-first fix from a cold start (~26s) to a hot start (~2s). The battery will maintain RTC and GNSS orbit data without being connected to power for plenty of time.
Also included with this kit is a GNSS multiband antenna, reversible USB-A to C cable, and SMA to U.FL cable. The included antenna features a magnetic base and is designed to receive both the classic L1 and L2 GPS bands. Meanwhile, the included cables will make sure actually hooking up each part in the kit is easy!
The SparkFun Qwiic Connect System is an ecosystem of I2C sensors, actuators, shields and cables that make prototyping faster and less prone to error. All Qwiic-enabled boards use a common 1mm pitch, 4-pin JST connector. This reduces the amount of required PCB space, and polarized connections mean you can’t hook it up wrong.
GPS-RTK Dead Reckoning Breakout - ZED-F9R:
- 2x Qwiic Connectors
- Integrated U.FL connector for use with antenna of your choice
- Concurrent reception of GPS, GLONASS, Galileo and BeiDou
- 184-Channel GNSS Receiver
- Receives both L1C/A and L2C bands
- Horizontal Position Accuracy:
- 0.2m with RTK
- Max Navigation Rate: Up to 30Hz
- Time to First Fix
- Cold: 26s
- Hot: 2s
- Operational Limits
- Max G: ≤4G
- Max Altitude: 80km (49.7 miles)
- Max Velocity: 500m/s (1118mph)
- Velocity Accuracy: 0.5m/s
- Heading Accuracy: 0.2 degrees
- Built-In Accelerometer and Gyroscope
- Time Pulse Accuracy: 30ns
- Voltage: 5V or 3.3V but all logic is 3.3V
- Current: ~85mA to ~130mA (varies with constellations and tracking state)
- Software Configurable
- Geofencing
- Odometer
- Spoofing Detection
- External Interrupt
- Pin Control
- Low Power Mode
- Many others!
- Supports NMEA, UBX, and RTCM protocols over UART or I2C interfaces
Antenna:
- Frequency:
- L1 Band: 1559-1606MHz
- L2/L5 Band: 1197-1249MHz
- Peak gain (over 15cm diameter ground plane):
- L1 Band: 3.5dBic
- L2/L5 Band: 0-2.0dBic
- VSWR: max. 2
- Bandwidth: min. 200MHz
- Impedance: 50 Ohm
- Polarization RHCP
- Supports GPS, GLONASS, Galileo, and BeiDou
- 5m coaxial cable with SMA connector
- Magnetic base, fixed installation option (screw mount, 2 x M4 screws)
- Dimensions: 60.0mm x 82.0mm x 22.5mm
- Weight: 175g (including cable)
- Frequency:
USB Cable:
- Reversible USB-A connector
- Reversible USB-C connector
- 0.8 meter cable length
GPS-RTK Dead Reckoning Breakout - ZED-F9R:
Antenna:
- Datasheet (ANN-MB-00)
- Product Summary
USB Cable:
{kind=link}
SparkFun GPS-RTK Dead Reckoning Kit Product Help and Resources
What is GPS RTK?
September 14, 2018
Learn about the latest generation of GPS and GNSS receivers to get 14mm positional accuracy!
How to Build a DIY GNSS Reference Station
October 15, 2020
Learn how to affix a GNSS antenna, use PPP to get its ECEF coordinates and then broadcast your own RTCM data over the internet and cellular using NTRIP to increase rover reception to 10km!
Setting up a Rover Base RTK System
October 14, 2020
Getting GNSS RTCM correction data from a base to a rover is easy with a serial telemetry radio! We'll show you how to get your high precision RTK GNSS system setup and running.
SparkFun GPS-RTK Dead Reckoning ZED-F9R Hookup Guide
July 9, 2020
The u-blox ZED-F9R is a powerful GPS-RTK unit that uses a fusion of IMU, wheel ticks, a vehicle dynamics model, correction data, and GNSS measurements to provide highly accurate and continuous position for navigation in the difficult conditions. We will quickly get you set up using the Qwiic ecosystem through Arduino and Python so that you can start reading the output!
Getting Started with U-Center for u-blox
September 13, 2018
Learn the tips and tricks to use the u-blox software tool to configure your GPS receiver.
Core Skill: Programming
If a board needs code or communicates somehow, you're going to need to know how to program or interface with it. The programming skill is all about communication and code.
Skill Level: Experienced - You will require a firm understanding of programming, the programming toolchain, and may have to make decisions on programming software or language. You may need to decipher a proprietary or specialized communication protocol. A logic analyzer might be necessary.
See all skill levels
Core Skill: Electrical Prototyping
If it requires power, you need to know how much, what all the pins do, and how to hook it up. You may need to reference datasheets, schematics, and know the ins and outs of electronics.
Skill Level: Competent - You will be required to reference a datasheet or schematic to know how to use a component. Your knowledge of a datasheet will only require basic features like power requirements, pinouts, or communications type. Also, you may need a power supply that?s greater than 12V or more than 1A worth of current.
See all skill levels
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
No reviews yet.