- Home
- Product Categories
- 2-axis
- SparkFun Gyro Breakout - LPY503AL (Dual 30°/s)


{kind=link}
SparkFun Gyro Breakout - LPY503AL (Dual 30°/s)
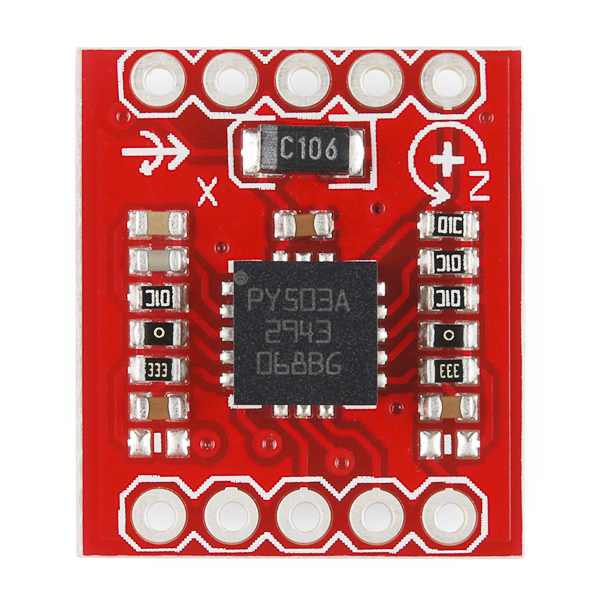
This is a breakout board for the ST's dual-axis LPY503AL gyro. The LPY503AL is a MEMS motion sensor that measures angular velocity along the pitch and yaw axes with a full scale of ±30°/s. Two different analog outputs are provided for both the x- and z- axes - one 1x amplified and the other 4x amplified.
A regulated voltage between 2.7 and 3.6VDC should be supplied to the power pins. We have the filtering circuits all set up; you'll just need to connect the outputs to an ADC, and you're ready to go.
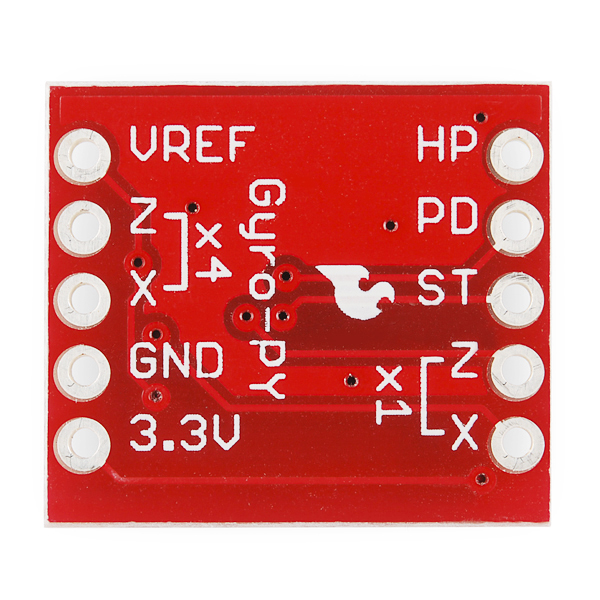
This breakout board includes the gyro and all necessary filtering capacitors as shown. The 1x and 4x amplified outputs of both axes are connected to the 0.1" pitch headers, along with the power-down, self-test, high-pass filter reset, and power pins.
We've revised this board to correct errors with the high-pass filter, so the output should settle when the unit stops moving.
Not sure which gyro is right for you? Our Accelerometer and Gyro Buying Guide might help!
- 2.7 to 3.6VDC power supply
- Dual axis, pitch and yaw sensing
- 1x and 4x amplified outputs for each axis
- Low power consumption
- All necessary filtering components included
- Access to power-down, self-test, and high-pass filter reset pins
- 0.6x0.7"
SparkFun Gyro Breakout - LPY503AL (Dual 30°/s) Product Help and Resources
Core Skill: Soldering
This skill defines how difficult the soldering is on a particular product. It might be a couple simple solder joints, or require special reflow tools.
Skill Level: Noob - Some basic soldering is required, but it is limited to a just a few pins, basic through-hole soldering, and couple (if any) polarized components. A basic soldering iron is all you should need.
See all skill levels
Core Skill: Programming
If a board needs code or communicates somehow, you're going to need to know how to program or interface with it. The programming skill is all about communication and code.
Skill Level: Competent - The toolchain for programming is a bit more complex and will examples may not be explicitly provided for you. You will be required to have a fundamental knowledge of programming and be required to provide your own code. You may need to modify existing libraries or code to work with your specific hardware. Sensor and hardware interfaces will be SPI or I2C.
See all skill levels
Core Skill: Electrical Prototyping
If it requires power, you need to know how much, what all the pins do, and how to hook it up. You may need to reference datasheets, schematics, and know the ins and outs of electronics.
Skill Level: Rookie - You may be required to know a bit more about the component, such as orientation, or how to hook it up, in addition to power requirements. You will need to understand polarized components.
See all skill levels
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
No reviews yet.
Is there any example code for this? I really don't know where to start.
I'm looking to determine when our robot has rotated 90 degrees.
Does anyone have any insight into how to get this board to give you coherent data with an arduino? I have three sketches, one of which is from the arduino library, that attempt to take info from the gyro over serial. I can't get any meaningful data, either that or I'm simply not inturpretting it correctly. Any help would be great, thanks.
What incoherent data are you getting? You should see values that change when you twist the part about the axes indicated on the silkscreen.
This is an analog part, so you can probably get some useful information about what you should be seeing simply by hooking it up to an oscilloscope and waving it around a bit.
In the absence of an oscilloscope, print the value of the ADC reading over the serial connection at, say, 10 Hz, and wave it around.
I find that actually watching the output with this sort of instant feedback gives me a much quicker familiarity with the device than an hour of reading the datasheet, appnotes, and schematic. Of course, reading is required later, but to get a quick understanding of whether or not it's working there's nothing like immediate feedback.
I also like to learn this most practical way. But I bought this gyro and monitoring its voltage through an AD converter and an oscilloscope. Realize that it has the output of any one of its bases has varied strangely. When I submit it to an angular velocity (using hands) its voltage rises (so far so good), but when I start to slow down even stop it, its voltage falls below the reference voltage (1.23V ) for a few seconds ... falling to about 1.1V for example, and will return to the reference voltage slowly as if a slight speed in the opposite direction. I believe there must be a problem because if the gyro stopped this he should have a voltage equal to the reference voltage, and also it should only provide a voltage below the reference voltage if I rotate in the opposite direction, am I right? I thank anyone who can help me.
Keep in mind this gyro has a 30degree/sec max range. So if you spin it 90degrees and it takes you less than 3 seconds to do it, the sensor can't keep up.
I got this board from Digikey in recent weeks, now I see the chip is listed as obsolete by both Digikey and Mouser, though Digikey still has some of these breakout boards in stock. I expect this board to be listed as Retired soon.
Hi, i don't understand wich kind of output signal the sensor Give me ( frequency, voltage, milliAmps) proportional to angular speed. I'd like to manage gyro with an industrial PLC using its analog interface.. Someone had experience about? Many thanks
Hello! I want to implement a sensor on a wheelchair to determine the inclination angle and thus control the power in the motors of the wheelchair. So that, if the surface on which the chair is moved is a climb, the power in the motors must increase, or if the surface is a slope, then the power in the motors must decrease. I don't know if to use an accelerometer or a gyroscope better. Can you help me with this, please?
Can you take a gyroscope that measures only pitch and yaw, and turn the board on one side to measure roll? Seems too simple to be true. I want to measure how much a plank lying on a substrate is tilted onto either lengthwise edge.
Of course, but in fact you only need to set the gyro pitch axis across the plank, then the gyro pitch axis becomes the plank roll axis. Easy.