- Home
- Product Categories
- SparkX
- A111 Pulsed Radar Breakout





{kind=link}
A111 Pulsed Radar Breakout
This breakout board has been retired, but check out its Red Cousin SparkFun Pulsed Radar Breakout - A111!
Does your project require high-precision, cutting-edge distance measurement? Or maybe speed-, motion-, or gesture-sensing? We're not talking about simple ultrasonic, or even infrared, sensors here, but 60GHz radar! Well say hello to our tiny, pulsed-radar friend: the Acconeer A111.
The A111 is a single-chip solution for pulsed coherent radar (PCR). It comes complete with integrated antennae and an SPI interface capable of clock speeds of up to 50MHz. The A111's primary use case is distance-sensing, but it also supports applications in gesture-, motion-, material-, and speed-detection. It can see objects at distances of up to two meters.
Our breakout board for the A111 includes a 1.8V regulator, voltage-level translation between 1.8V and either 3.3V or 5V, and, of course, it breaks out all pins of the pulsed radar sensor to both 0.1-inch and Raspberry Pi-friendly headers.
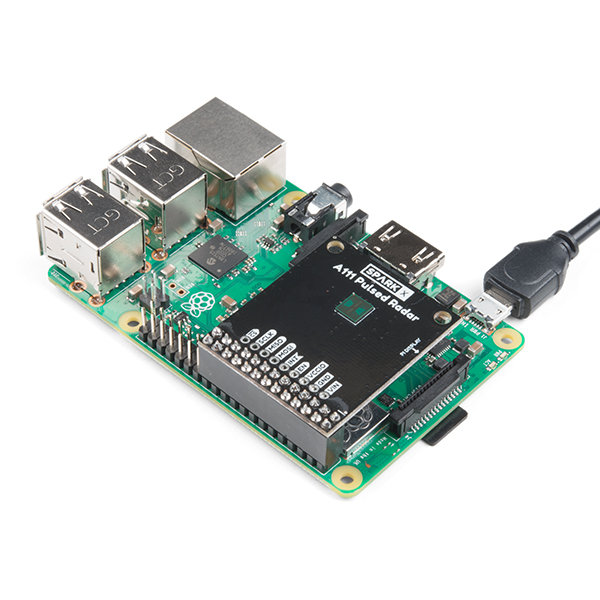
The breakout board is primarily designed to interface directly with a Raspberry Pi – Acconeer’s SDK currently only supports ARMv7’s (e.g. a Pi) and ARM Cortex-M4’s (e.g. the nRF52832). Check out our Using the A111 Pulsed Radar Breakout tutorial, which explains how to use the sensor with a Raspberry Pi.
Experimental Product: SparkX products are rapidly produced to bring you the most cutting edge technology as it becomes available. These products are tested but come with no guarantees. Live technical support is not available for SparkX products. Head on over to our forum for support or to ask a question.
- A111 Breakout Board
- 26-pin (2x13) female header
- 60 GHz Pulsed Coherent Radar (PCR) sensor
- Integrated antenna
- Measurement distance up to 2m
- Accuracy down to mm-range
- SPI interface -- up to 50MHz SPI clock support
- All SPI pins broken out
- On-board 1.8V regulator
- 1.8V level translation to any voltage between 1.8V-5V
A111 Pulsed Radar Breakout Product Help and Resources
Getting Started with the A111 Pulsed Radar Sensor
September 26, 2019
Get started with the Acconeer A111 SDK with a Raspberry Pi! The tiny A111 pulsed coherent radar (PCR) adds high-precision, cutting-edge distance measurement for speed-, material-, motion-, or gesture-sensing projects! We’re not talking about simple ultrasonic, or even infrared sensors here, but 60GHz radar!
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
5 out of 5
Based on 1 ratings:
Works perfectly
Easy setup, perfect results.
There are a lot of examples available now on GitHub https://github.com/acconeer All in python
Has anyone else not been able to talk to the board via I2C? The board doesn't have any LED's lighting up, and when it's connected, i2cdetect doesn't show any I2C devices. Any ideas?
Were you ever able to connect via I2C? Were you able to use the acconeer exploration tool to connect or able to use pyserial?
Are there any examples of measuring speed with this unit? The examples I found in the documentation and GitHub repo all seem to focus on measuring distance.
To measure speed using a pulsed mode radar (if you don't access to Doppler information...) you would start a timer at the instance of your transmit pulse, and then stop the timer when you get a return pulse - how long it takes for the pulse's round trip is directly related to the distance. They are already doing that for you in the distance measurement routine. You would save that distance in a variable, then take another distance measurement and if it has changed, either coming closer, or getting further away, you would want to know the time it took for it to move that distance - that would be the speed - you are basically measuring the distance of travel over time.
You would want to take a series of those measurements and average them a little to weed out the fact the target will likely not be a perfect reflector - One reading might be of the front bumper, the next you might get a stronger return off the rear wheel - those kinds of things will add "noise" to your data you would need to account for.
That's how police LIDAR works, but its easier because a laser beam is still relatively narrow a distance and you don't have near the problems with the beam reflecting off of random surfaces - unless the officer has a really shaky hand. But they have software that is averaging and throwing away any wild returns, it needs to send a series of pulses to do this, but the clock rates of course fast enough the operator will just get a solid speed reading and distance, and the speeder will get a ticket before they can blink. The problem being with that is they can't be moving. Its stationary operation only. But they can use the distance measurement the LIDAR provides to check for tail gating, accident scene measurements, etc. Its also very hard to defeat outside of methods we wont talk about here... Radar detectors are absolutely useless against LIDAR because by the time you hear an alert, the nice LEO has your speed, and if you are breaking the law, good luck. All because it is an optical, line-of-sight dependent device that isn't spraying the air waves with RF - With radar, the ball is always in the violator with a radar detectors court due to 1/R^4 > 1/R^2
Radio waves spread a lot at distance, and by looking at the measurement distance of this thing, of only 2 meters, its kind of apparent it wouldn't be very useful for speed radar. You might be able to make some sort of dielectric lens, like a on a real police radar. If you've ever noticed the antenna of one of those it will have lens looking plastic dome on it, a bit like a can of soup with a spot light lens stuck in the end of it. That is a dielectric lens, it actually focuses the beam of RF from horn antenna inside the can just like an optical lens would focus a light beam from a light bulb for a narrower beam width at distance. I'm sure there is some sort of modeling software out there that could help design the lens, and you would probably need it - but at 60GHz, that is roughly twice as high in frequency as Ka band police radar, so the lens for this would need to probably be roughly half the dimensions?
I haven't read the datasheet for this thing, but I imagine it was intended for blind spot detection or collision avoidance more than long distance speed measurement.
Big radars, like weather or military types would be using the Doppler information of the return pulses for velocity information, as it would be a direct "measurement" rather than a distance over time "calculation" and much more reliable data. In fact, that is what police speed radar uses, the Doppler shift caused by the motion of your car in relation to the transmit frequency, which is constant, or constant wave (CW) mode because they don't really car about distance information and it's a lot cheaper than pulsed mode radar. The other advantage to CW Doppler police radar is they can be in motion and still clock violators, by taking into account the police cruisers speed via Doppler and throwing it out, leaving only target speeds. Again, not having read the datasheet or "SDK" - Maybe they give you a Doppler output? Then it would be a simple matter of doing the math to correlate Doppler shift to velocity
The only real advantage for a pulsed mode police radar would be a lower probability of intercept for those using ECM - i.e. a radar detector... In other words, it would be all the more difficult to detect a police cruiser running pulsed radar vs. CW radar. Again - 1/R^4 > 1/R^2 is a win pretty much every time for the radar detector and anything that can help offset that is an advantage to the radar and its operator....
Unfortunately not, the only examples in the SDK are a distance detector, and how-to's on using the IQ, power bin, and envelope services. Hopefully Acconeer continues building on the SDK to produce more application-esque examples.
Very cool, I might need to order one of these little ladies soon! Unless I misread the data sheet it looks like the range for measuring goes up to 2 meters.