- Home
- UDB4 - PIC UAV Development Board

{kind=link}
UDB4 - PIC UAV Development Board
Replacement: None. We're no longer building this board. This page is for reference only.
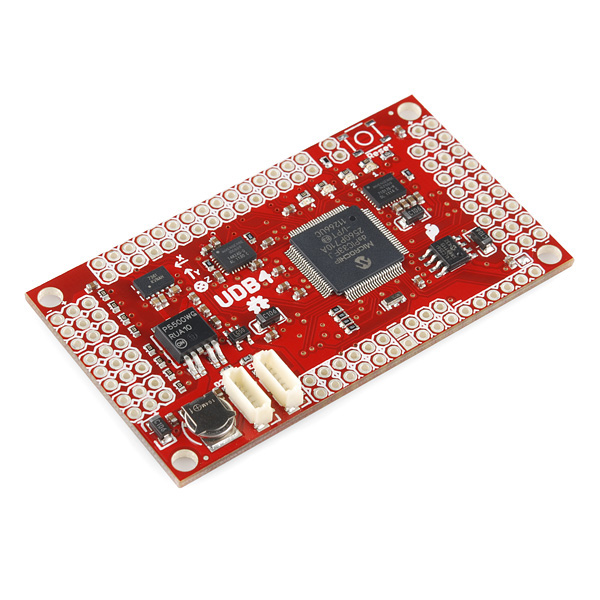
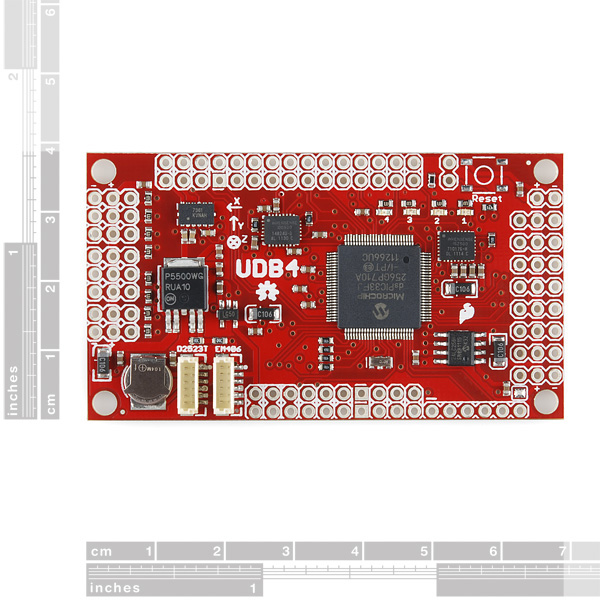
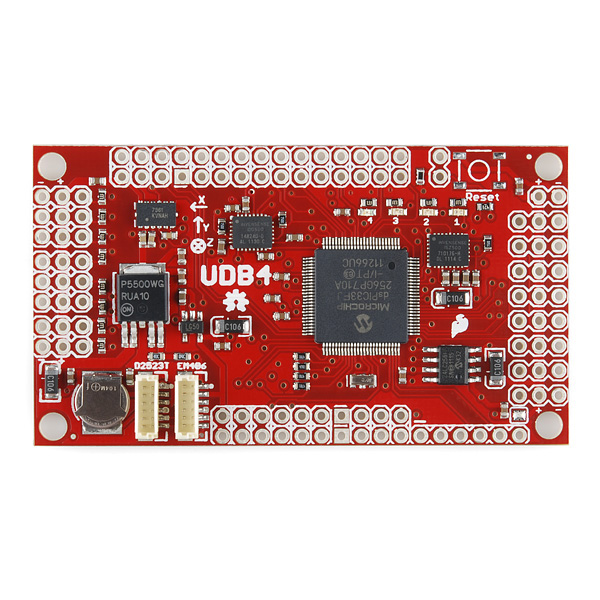
This is our UAV Development Board (UDB4, as in, "UAV Development Board version 4"). The UDB4 comes populated with a dsPIC33FJ256 CPU, an MMA7361 three axis accelerometer, a dual axis IDG500 gyro, and a single axis ISZ500 gyro. The on-board Invensense gyros even have enough vibration tolerance to be used in RC heli applications.
By itself, the board can be used to develop a three axis IMU controller. By addition of an EM406 or D2523T GPS receiver, it can be used to develop a UAV controller for an RC car, plane, helicopter, or boat. It comes with self-testing firmware that can serve as a starting point for you to develop your own control and navigation firmware. There is even fully functional, open source autopilot firmware available. We've removed the reset button in order to prevent in-flight resets (not good). The PCB hasn't changed, however, so if you like, you can still add a reset button. Note: **For programming, we recommend the PICkit3. Check the related products below. **Note: A GPS module is not included. Check the related products below.
Replaces:GPS-10582
- compatible with 20-channel EM-406A SiRF III GPS
- compatible with 50-channel GS407 Helical GPS
- dsPIC33FJ256 Controller (with onboard 3.3V and 5V glue logic)
- dsPIC runs at 120MHz with 8MHz resonator and PLL
- MMA7361 three axis accelerometer
- IDG500 dual axis gyro and ISZ500 single axis gyro
- External 256Kbit EEPROM
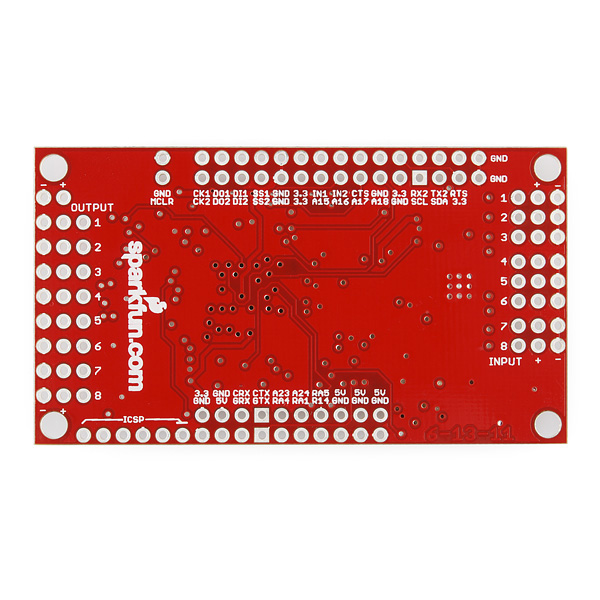
- Up to 8 Input, 8 output PWM points
- 6-wire debug header or ICSP header
- 4 separate colored status LEDs
- On board 3.3V and 5V regulators (150mA max)
- Spare USART connection for debugging, flight logging, wireless telemetry, etc.
- 30 spare analog and digital I/O pins for debugging and interfacing to sensors
- Schematic
- Eagle Files
- Datasheet (MMA736)
- Datasheet (IDG500)
- Datasheet (ISZ500)
- MatrixPilot Code
- DIYDrones UDB Page
- DIYDrones UDB Article (how the UDB handles sustained rotations)
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
No reviews yet.
Has this been discontinued? Hopefully not, even as I heard that UDB5 is just around the corner.
Everyone: UDB4 has been discontinued, the gyros that it uses are no longer available. UDB5 is just around the corner. Basically, it will be UDB4, except with the MPU6000 gyro/accelerometer chip. SparkFun is in the process of designing the hardware. The UDB software team has tested the MPU6000 with a breakout board connected to a UDB4, and is in the process of preparing the UDB5 software, so it will be ready when the UDB5 goes into production. Best regards, Bill Premerlani
Hello, Did anybody succeed to use this board with Matlab/Simulink real time workshop (RTW) ? If not, I am looking for such a hobbyist dspic board to use with Matlab RTW. Thanks and best regards,
Francis
Hi Francis, I am not sure if anyone has used this board with Matlab/Simulink or not. However, I am optimistic that it is possible, because the MPLAB IDE used to program the UDB has an "Matlab/Simulink" entry under the Tools tab. If you already have Matlab/Simulink (I do not), you could find out more before you buy the board, because you can run the UDB4 software in simulate mode without actually having the board. In any case, I suggest you repost your question to the UDB users's group, and take a look at the UDB website. Best regards, Bill Premerlani
Has anyone managed to use this on a quad copter or something?
Gideon, Some folks at MIT used the UDB4 on variable pitch quads. They wrote their own software. There was a posting by Chris Anderson on diydrones.
Presently, Mark Whitehorn is working on open source controls for quads. Here is a discussion. The software is under development, but if you want to try it out, it is available in the software repository of the MatrixPilot website.
Best regards, Bill Premerlani
Yup
So where is the data sheet on the UDB4. I see data sheets on on the individual chips but not the UDB4. I have been trolling through the DIYDrones site and can't find anything useful for a beginner. I just want to see the Accelerometer and Gyro data stream out of a pin or something. What pin do I use? A data sheet could answer all the basic questions.
FYI- the dsPIC33 on this has a maximum internal oscillator speed of 80 MHz, which is misleading anyway (clock rate != CPU speed), since it is divided by 2 to get the actual processor instruction clock, this part is really 40 MIPS.
The dsPIC30 used a 120MHz maximum clock, divided by 4 to get a 30 MIPS CPU.
"...in order to prevent in-flight resets (not good)."
Lol!