- Home
- Product Categories
- Development Tools
- ArduPilot Mega - Arduino Mega compatible UAV Controller

{kind=link}
ArduPilot Mega - Arduino Mega compatible UAV Controller
Replacement:GPS-10294. The latest revision uses the ATmega2560 in place of the ATmega1280. This page is for reference only.
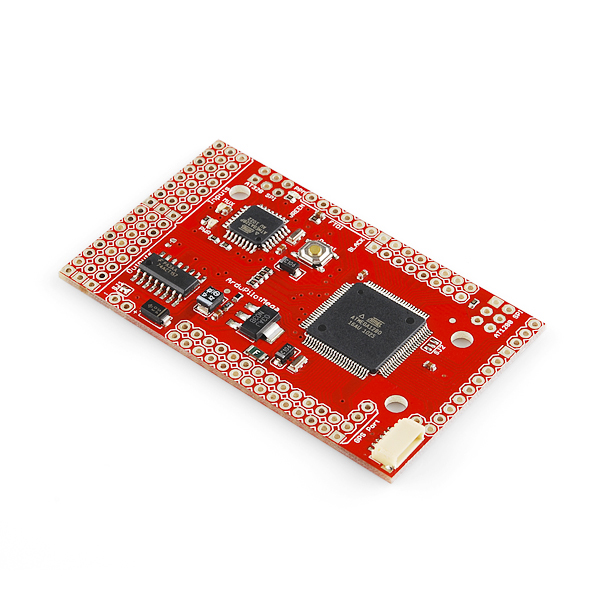
The ArduPilot Mega is the newest version of autopilot board designed by Chris Anderson and Jordi Muñoz of DIY Drones using the ATmega1280.
ArduPilot Mega is a fully programmable autopilot that requires a GPS module and sensors (IMU sensor shield available from DIY Drones) to create a functioning Unmanned Aerial Vehicle (UAV). The autopilot handles both stabilization and navigation, eliminating the need for a separate stabilization system. It also supports a "fly-by-wire" mode that can stabilize an aircraft when flying manually under RC control, making it easier and safer to fly. The hardware and software are all open source. The board comes with all the surface-mount parts already soldered, but requires the user to solder on connectors. RC processing firmware is already loaded, but the autopilot software must be downloaded and loaded onto the board by the user. It can be programmed with the Arduino IDE.
We recommend the following items to accompany this product:
- uBlox 5 GPS module and adapter
FTDI Basic or FTDI cable for programming
Other necessary elements, including aircraft recommendations, can be found at the project's home page. Note: This product is a collaboration with Jordi Munoz of 3d Robotics. A portion of each sales goes back to them for product support and continued development.
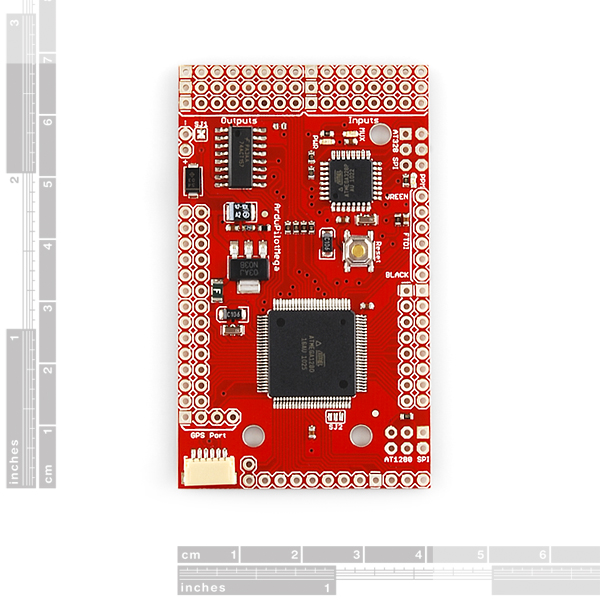
Features:- Controller designed to be used with autonomous aircraft, car or boat.
- Based on a 16MHz Atmega1280 processor.
- Built-in hardware failsafe that uses a separate circuit (multiplexer chip and ATMega328 processor) to transfer control from the RC system to the autopilot and back again. Includes ability to reboot the main processor in mid-flight
- Dual-processor design with 32 MIPS of onboard power
- Supports of 3D waypoints and mission commands (limited only by memory)
- Comes with a 6-pin GPS connector (EM406 style).
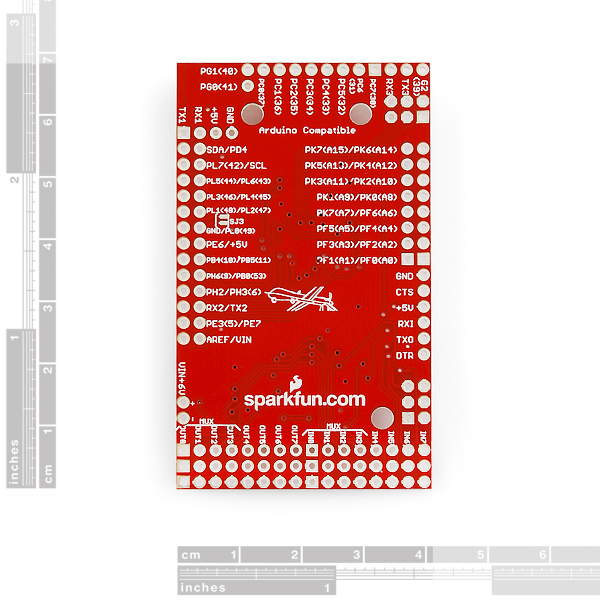
- Has 16 spare analog inputs (with ADC on each) and 40 spare digital input/outputs to add additional sensors
- Four dedicated serial ports for two-way telemetry (using optional XBee modules) and expansion
- Can be powered by either the RC receiver or a separate battery
- Hardware-driven servo control, which means less processor overhead, tighter response and no jitters
- Eight RC channels (including the autopilot on/off channel) can be processed by the autopilot.
- LEDs for power, failsafe status, autopilot status and GPS lock
- Full autopilot software, including IMU and groundstation/mission planning code, are available at DIY Drones. Code supports autonomous takeoff and landing.
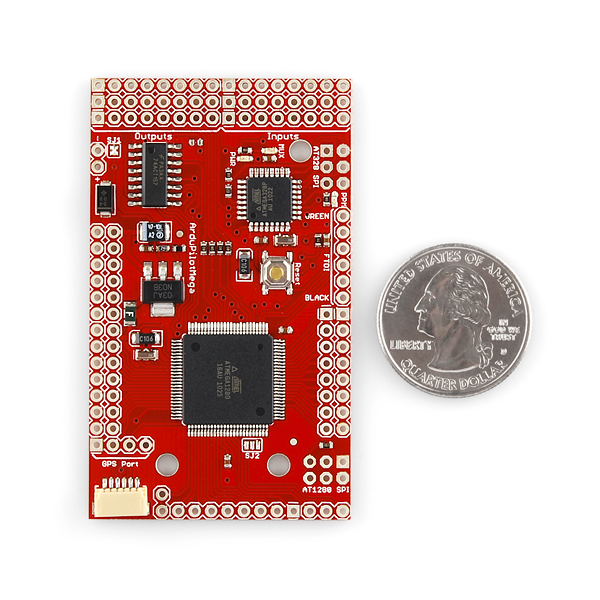
- 40mm x 69mm
- Schematic
- Eagle Files
- Example Firmware - reads in 8 channels and outputs 8 channels* ArduPilot Project Homepage
- Software and instructions: DIY Drones Community
ArduPilot Mega - Arduino Mega compatible UAV Controller Product Help and Resources
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
No reviews yet.
esklar81: Just because I'm a picky SOB:
The first paragraph says "Atmega 1280" and the second bullet in Features says "Atmega 328". How about either explaining or correcting this, as appropriate?
TIA,
Eric
It has both. Check out the schematic. Also, follow the link to the ArduPilot Homepage to see how the two uControllers are used.
sumatra,
Thanks for the suggestions.
I've looked at the provided schematic and am having a great deal of difficulty tracing signal paths on my screen. It's not that I'm unaccustomed to the task (I've reviewed more schematics that I'd care to try to count.), it's that the drawing is split and most of the signal paths are not drawn. I'm going to try printing it so I can put it back together, then trace the signals in various colors.
Unfortunately, all I can find by following the links provided is information on the previous generation (Atmega328 + ATtiny). If you can provide links to similar information on the new generation, I'd appreciate it.
TIA,
Eric
The Eagle design files (and the photos) appear to relate to an early version of the board, not the the v1.4 board which I have. Does anyone know where I can find up to date design files?
TIA Ian
Can the Razor 9DoF board be used for the IMU board on the ArduPilot Mega. The idea would be the Razor 9DoF can spit out data over the serial port and use 1 of the 4 dedicated serial ports on the ArduPilot to suck the data in. You would just need a standalone pressure sensor (I2C).
Any chance we'll ever see SFE bring the Oil Pan in house to keep up with demand of this board? I'd like to see it in blazing red to match! (I'd also kill for a black from DFRobot, haha)
Are the new AP Mega 2560 shipping yet? I know that they should be shipping soon, but I was just wondering if there was a date that they came out. I won 40 dollars from Free Day that I would like to use on that.
Thanks,
Kyle
Never mind about my request for the 2560. Chris Anderson at DIY Drones told me that it is not worth the wait.
Thanks,
Kyle
Are you going to board revision 1.4 when you get these back in stock?
I'm usually not a fan of giving ETAs because they can be so fuzzy... That being said, we have had some supply issues with some of the parts on this board and we should (SHOULD) be able to get them in a week or do. Expect that to be possibly delayed though.
I ordered the unit..When I ordered it said available in inventory..It took 15 days and now says backorder..please let me know when i will receive the item...I already paid and waiting for backorder to ship..
regards
When do you expect to have these back in stock?
Thanks!
Same question...
I soldered a magnetometer on the OilPAN <br /> Then I uploaded the test code for compass to get offsets and everything was working well and I decided to load SuperStable code.<br /> <br /> I switched off everything, in order to plug the MTK-GPS. Then plug back the usb wire and led�s stared to blink as usual. I decided to get latitude from GPS, to check it last time, before uploading the fying code and I moved a quad close to the window to see satellites.<br /> I saw that gps plug are a bit skewed in the socket, and I have corrected it and the board suddenly died.... Led's are not blinking anymore.....<br /> I tried to start it without any external parts but not managed.<br /> <br /> The apm is not working at all, neither from external power, nor from FTDI cable.<br /> RIP<br /> <br /> But the OilPAN seems to work, at least led�s are working when I plug it to usb without APM.<br /> <br /> I checked the fuse on APM and it work, but I have no idea what to check else.....<br /> Probably someone could guess, what to check or replace in order to resuscitate it?<br /> Victor.
I have the same question: When will it be in stock!!!!
You guys are like vultures.
We are backordered on a part and waiting for it to show up. As soon as it does, these are very high priority and will be built immediately.
Hi guys, when are these going to be off backorder.
I do not know if it is the proper place to post this, but is it possible to hook up 6 or 8 ESC?
In other words, is it possible to control an exa or octo coaxial with this controler or should I get one more shield or so?
Sory for my nub question.
Best regards
Note from my experience with it:
Careful plugging servos/etc into the inputs/outputs while the board is powered (and in general as well)
I killed the output 1 of the MUX on the first day of really playing with it. I'm gonna have to hot-air off the old 74157 and put a new one on it.
See diydrones forum for more info:
http://diydrones.com/forum/topics/output-died-on-mux
Please note that the current version of the firmware for this board from DIY drones will NOT function without the OilPan shield (Including simply running HIL with XPlane)
I am currently working on a version of the codebase that will function without the OilPan.
Msg me if you would like a copy.
can this be used like any other arduino Mega? I ask because the form factor of this board is much more conducive to a project I am working on.
Why we need a 3.3 FTDI anyway?
isn't this board run on 5 volts?
I bought the 3.3v FDTI basic, if I modify the voltage output and TX and RX to 5V, will it still work with this board?
Thank you!
Hi,
The recommended FTDI Basic for this board is the 5V version. If you modify the 3.3V version to work at 5V that would likely work, but from best results you will want to simply use the recommended part. DEV-09115
Thanks,
Tim
Thanks Tim.
It seems that if I use this 3v3 product, it would only supply 3v3 power to my ardupilot board.
It works fine with my board right now.
I guess my question is,will other digital peripheral devices works fine with a 3.3v logic? if my ardupilot board output a logic HIGH, will it be recognized as a logic HIGH by other 5V logic devices?
Could you explain to me why its using 3.3v for RX and TX instead of 5V?
Thank you very much!
does this come with the right angle pin headers necessary to control the servos or do we have to find them else where
The board comes populated as in the pictures. We do have a decent collection of headers also available on our site, some of which are present in the related items section below.
QuickQuestion: Just to clarify- The pictures show no headers. Therefore, NO header pins/strips come with this item and we should order them separately. Is this right?
Thanks,
MattEvans16: I thought when I ordered my ArudPilot Basic in the past it came with the headers; I just had to solder them on. Am I incorrect? I Just ordered the Mega, do I also need to purchase a lot of headers?
What you see in the picture is what you get. You have to buy and solder the headers you want onto the ArduPilot yourself.
I thought when I ordered my ArudPilot Basic in the past it came with the headers; I just had to solder them on. Am I incorrect? I Just ordered the Mega, do I also need to purchase a lot of headers?
Just to clarify- The pictures show no headers. Therefore, NO header pins/strips come with this item and we should order them separately. Is this right?
Thanks,
Why is this a 5V power system? Sensors are 3.3V and U3 is a LS157 mux which will not be happy then.
The shield that accompanies this (see diydrones.com) has 3.3V Regulated supply for all the sensors.
The Arduino works off 5V. I looked up the datasheet of the LS157, which seems to be also a 5V device (I don't get what you mean by "LS157 mux will not be happy then").
@Superduif
Agree. Would be nice to have fail safe on 5..8.
Preferably you could enable/disable the fail safe on each channel as you don't need a fail safe on the mode switch (or other Input that doesn't correspond to an output) now do you?
This looks great! Too bad that the fail-safe only works on channel 1..4. This means that channel 5..8 can not be safely used for control purposes. Will the next version have two 74LS157D?
Regards,
Eddy
Right now it's just for planes, but quadcopter support is coming soon. No plans for helis at the moment.
Will this preform the same functions on a helicopter, or is it for fixed wings only?
I too am interested in helicopter applications!
Why the recommendation for the uBlox 5 GPS? Will the EM-406A also work?
The uBlox uses a helical antenna, so positioning will be easier. You can use the EM406A if you want though.
Product description has now been corrected.
Just because I'm a picky SOB:
The first paragraph says "Atmega 1280" and the second bullet in Features says "Atmega 328". How about either explaining or correcting this, as appropriate?
TIA,
Eric
There's nothing to correct. This board has both microprocessors. The smaller for failsafe.