- Home
- Product Categories
- Sensors
- 9 Degrees of Freedom - Razor IMU - AHRS compatible

{kind=link}
9 Degrees of Freedom - Razor IMU - AHRS compatible
Replacement:SEN-10736. This board has been updated to use the HMC5883L instead of the end-of-life HMC5843. This page is for reference only.
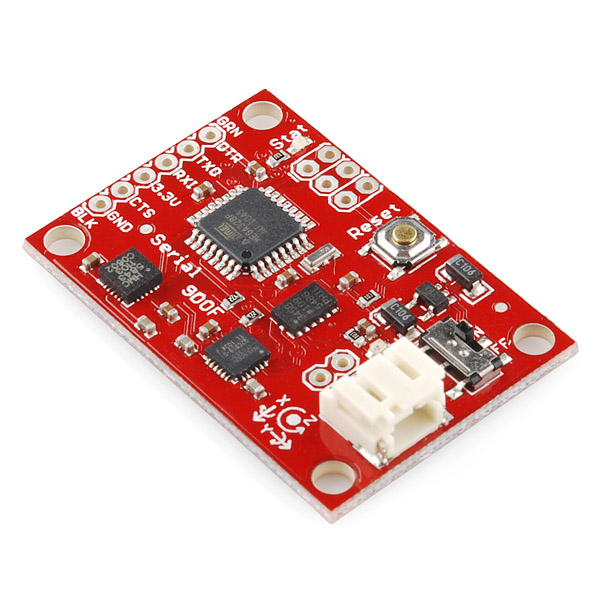
The 9DOF Razor IMU incorporates three sensors - an ITG-3200 (triple-axis gyro), ADXL345 (triple-axis accelerometer), and HMC5843 (triple-axis magnetometer) - to give you nine degrees of inertial measurement. The outputs of all sensors are processed by an on-board ATmega328 and output over a serial interface. With the work of Jordi Munoz and many others, the 9DOF Razor can become an Attitude and Heading Reference System. This enables the 9DOF Razor to become a very powerful control mechanism for UAVs, autonomous vehicles and image stabilization systems.
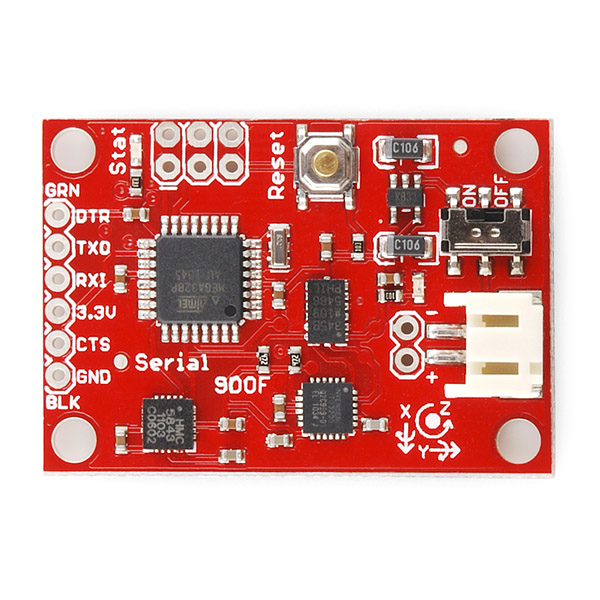
The board comes programmed with the 8MHz Arduino bootloader and example firmware that tests the outputs of all the sensors. Simply connect to the serial TX and RX pins with a 3.3V FTDI Basic Breakout, open a terminal program to 38400bps and a menu will guide you through testing the sensors. You can use the Arduino IDE to program your code onto the 9DOF, just select the 'Arduino Pro or Pro Mini (3.3v, 8mhz) w/ATmega328' as your board.
The 9DOF operates at 3.3VDC; any power supplied to the white JST connector will be regulated down to this operating voltage - our LiPo batteries are an excellent power supply choice. The output header is designed to mate with our 3.3V FTDI Basic Breakout board, so you can easily connect the board to a computer's USB port. Or, for a wireless solution, it can be connected to the Bluetooth Mate or an XBee Explorer.
Having a hard time picking an IMU? Our Accelerometer, Gyro, and IMU Buying Guide might help!
Note: This product is a collaboration with Jordi Munoz of 3d Robotics. A portion of each sales goes back to them for product support and continued development.
Note: We found these in inventory and they work fine but we're no longer making them. We'll be selling them at a discount for a limited time but when they're gone, they're gone!
Replaces:SEN-09623
- 9 Degrees of Freedom on a single, flat board:
- ITG-3200 - triple-axis digital-output gyroscope
- ADXL345 - 13-bit resolution, ±16g, triple-axis accelerometer
- HMC5843 - triple-axis, digital magnetometer
- Outputs of all sensors processed by on-board ATmega328 and sent out via a serial stream
- Autorun feature and help menu integrated into the example firmware
- Output pins match up with FTDI Basic Breakout, Bluetooth Mate, XBee Explorer
- 3.5-16VDC input
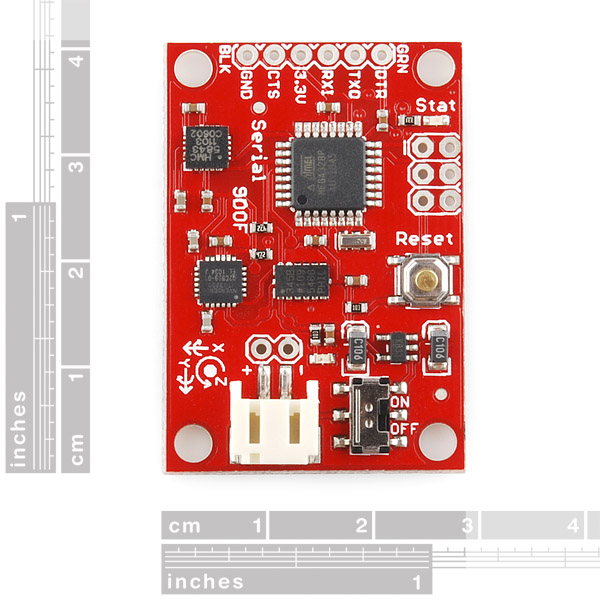
- ON-OFF control switch and reset switch
- 1.60 x 1.10 " (40.64 x 27.94 mm)
- Schematic
- Eagle Files
- Test Firmware
- 9DOF AHRS Code Base
- 9DOF AHRS Updated Code (thanks Sean!)
- Datasheet (ITG-3200)
- Datasheet (ADXL345)
- Datasheet (HMC5843)
9 Degrees of Freedom - Razor IMU - AHRS compatible Product Help and Resources
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
No reviews yet.
The code hasn't been updated since 2010 but the hardware changed a lot and the old code had a lot of bugs. I managed to update it to the new hardware so if anybody needs it, CONTACT ME! Or it could be uploaded to the sf9dofahrs google code repo if anybody have a clue how to do it.
Please add me to your list :-)- fcharp(at)rogers(dot)com. Cheers.
Can You send me Your new code?
Lep424(at)wp.pl
Thank a lot
If you could add me to this list I sure would appreciate it. Thanks! eric3d (at) hotmail.
Me too, me too! toborguru (at) toborguru (dot) net
Thanks.
Would love a copy of this, thank you so much! I've been trying to work through updating it myself, with no luck reading from the gyro, been wondering if mine is even working.
andrew(dot)cuesta(at)gmail(dot)com
Thanks again!
Hi David.
Would be great to send me the code too. (m.rohrauer[at]aerospy[dot]at)
Thanks a lot, regards, Manuel
Hey David. I tried for quite a long time modifying the code, but no luck(/skills?)...
Can you help me at mr.ki.ou (a't) gmail (d'ot) com ?
Thx ;)
Hey David,
I'm also interested: stefg_de(at)yahoo(dot)de
Thanks in advance,
Christian
Did someone receive anything? Not me :(
Would be cool to send it to my mail: stefg_de(at)yahoo(dot)de
Thanks,
Christian
Nope I have not seen or heard anymore about the code update. If anyone has received a copy maybe they could get it on the web, or added to the existing repository.
A new google group has been setup for the code update: sf_ 9dof_ ahrs_ update (no spaces, I had to break that up because the formatting was off)
Can you please send me your code? (you'll find my @ in my profile)
I would be interested in seeing your code. Please send to cory(dot)duce(at)gmail(dot)com
This wasn't tested with the new version but assuming the new version outputs the same info when running the AHRS code... this is small Windows program with minimal dependencies that should run on most versions of Windows from XP SP3 on using WPF that emulates the python 3D display shown above. You need to have the ARHS firmware installed. See http://code.google.com/p/sf9domahrs/issues/detail?id=22
The code hasn't been updated since 2010 but the hardware changed a lot and the old code had a lot of bugs. I managed to update it to the new hardware so if anybody needs it, CONTACT ME! Or it could be uploaded to the sf9dofahrs google code repo if anybody have a clue how to do it.
Hello David,
could you please add me to the mailing list as well?
alevtina.p@gmx.de
Thank you an advance!
BR,
Alevtina
Hi David,
I need a code that gives the euler angles properly. The AHRS code gives 0 for gyros somehow, so everything is wrong.
Can you send me some proper code? mortezahaydari at yahoo dot com
Hi, I added you to the mailing list, please read through it and you will find the updated code.
A new google group has been setup for the code update:
sf_ 9dof_ ahrs_ update (no spaces, I had to break that up because the formatting was off)
+1 yes please to a copy of the code. Email in profile.
Hi david,
I would really appreciate the new code. Thanks
I cannot send you the code, neither add you to the mailing list if i dont know you email address. Mailing list is: sf_9dof_ahrs_update@googlegroups.com You can read it and download the latest code from there.
Hello. I would greatly appreciate getting a copy of your code. My email is rasmussen.chris (a t) gmail . com.
Thanks so much.
Hi david.
please send your great codes to my Email(jamgostar.com@gmail.com) if it is possible.
best regards
Try to avoid posting your email address online. Spambots will get it.
Hi David, that sounds great. Could you please send me your code as well to qosoq[@t]sunrise[d.t]ch Thanks
Hi,
I would really appreciate that new code. Can you mail it to me (sfmq[at]sapo[dot]pt)? And btw, can you explain me what did you change, so i could better understand it?
Regards
I also would like the new code! ajalics@grail.csuohio.edu. It should really get into the google code repo - looks like a subversion repository. Not sure how you become a user. Either that or a fork or github. Maybe the sparkfun guys could help out here...
Hi David,
Thanks for updating the code. I also would need it pls. Is it possible to send it to my emails address (m.rohrauer[at]aerospy[dot]at)? It would be great if you upload it to the google code repo too. Regards
Of course I need your code ; ) (fonti_limon@hotmail.com). But I think that I am not the only one... It would be a great idea to upload your code to the sf9dofahrs google code repo. I don't know how to...
Does the new version of Razor IMU work fine with this code? Does it get lost with yaw?
Regards
This is a great product, but why is it so expensive?
Everyone, please save these comments for economics forums.
And yes, the secret it out, we built products at a profit and our goal it to make money so we can pay the bills. Our business plan has been ousted!
Why are you being sarcastic to your customers?
Hugo, While Roger's reply may seem slightly snarky, consider this:
On this page there are links to the Eagle files and anything else you might need in order to go out, buy the parts, etch a board, and make the whole thing yourself for cost and time spent. That is pretty amazing when you think about it. Given that level of intellectual generosity on Sparkfun's part, how can anyone whine about prices?
Roger was probably justified in being a little testy, even if it might not have been the most diplomatic customer service oriented thing to say. Besides, you've got to pay for all those first class airfares to Copenhagen somehow! ;^)
As always, YMMV.
All your points are valid. I could go and make my own as everything here is open source. (A wonderful concept which is what keeps me coming back.) I have spent thousands in the past four years on Sparkfun parts and I have recommended Sparkfun to hundreds of my students. In fact, there is an Electronics store in Toronto (Canada) which became one of Sparkfun's distributors after I introduced them to him and spoke highly of their products. I am not against Sparkfun making a profit, I asked: where does reasonable profit end? In fact, I purchased the old version of this board at $125! I was hoping that the new (slightly) modified version would be cheaper since all the design, testing etc. was mostly done.
If you consider Sparkfun is an American company (not that it matters to a Canadian) that does a lot of internal R&D work (more than the average medium sized company)the mark up would be necessary to cover costs (parts, warehousing, labor, facilities and tools), pay for R&D for products that have not yet been produced, allow for growth as a company (big changes in the few years I've been shopping here) and provide a buffer for the economic climate we find ourselves in here in the States.
If you dont like the pricing you don't have to buy it. I might get one after a paycheck or two. Gosh I wish I was making what I was 4 years ago.
Who's Roger? ;-)
You bring up good points. The Eagle files are above, as well as the schematic. The source code is up there too. The whole project is open source, so you are more than welcome to produce your own.
However, it isn't easy! It takes time to buy the parts, test the design, make the design, buy boards in quantity (a single PCB can be pricey), and then assemble and test everything.
If you want to do it on your own, we encourage it. But for most people, they will find that it's much cheaper (assuming your time costs something) to just buy it from us. Sure, we make a profit, but it's to cover the costs of all of the above.
If you add up the cost of the gyroscope, accelerometer, and magnetometer breakouts, you'll see that they add up to about $128. This board is a good deal for its price.
~$70 worth of parts + $50 design, labor, and QA = resonable price. The price for labor and testing is well worth it for me seeing as I don't have the tools to make the pcb and solder the SMD parts. My next paycheck is going towards one!
Actually from the manufacturer the gyr0 is $10 the accel is $7 or less if i recall correctly and the mag is around $15, this with the $5 micro and probably $10 worth in the circuit board, caps and regulator the total comes out to about $47.
that leaves $78 to be accounted for. with markup prices at other stores usually around %100 this product is a little overpriced, id buy it for $100.
Sparkfun please correct me if i'm wrong
You do understand that Sparkfun needs to not only make a profit on the parts, but on the R&D, testing, etc for the product right? It costs far more than you'd ever expect to bring a new product to market.
No need to buy it if it doesnt hit your value proposition, I'm sure they will sell plenty at the current price!
Your comment is rather strange to me. Are you suggesting that you would not be happy if this product were cheaper? Unless you somehow think Sparkfun is a charity organization, or a non-for-profit organization.
Of course it is neither. I am a huge fan and a long term customer of Sparkfun, but this product clearly has a huge markup. They can afford to do this because they are the only ones who have something like this at this price.
You don't need to run to their rescue and defend their prices. What kind of a customer does that?!
"What kind of a customer does that?!"
A thoughtful and responsible one who understands that in a free and open marketplace, profit is a good thing for everyone, even the customers?
If Sparkfun is the only ones selling this, why don't you offer one for sale in competition with it at what you consider to be an appropriate price?
Throwing stones is easy, building something with them takes a bit more effort.
"You don't need to run to their rescue and defend their prices. What kind of a customer does that?!"
Customers that love the company, like most sparkfun customers. We love sparkfun and everything they do, so when someone comes out saying they are taking advantage of us, we feel like we should correct them.
No one is saying we'd be unhappy if the product were cheaper (and come on, you know that wasn't what they were saying), but we're saying we're not unhappy that it is priced the way it is.
And honestly, if sparkfun priced everything so low they didn't make a profit, then hell yeah we'd be unhappy! We want sparkfun to continue making awesome stuff, so we're happy to give them our money!
No problem, you can continue to be a Sparkfun fanboy, and I will continue to be a Sparkfun fan.
As someone else mentioned, this product (for Sparkfun) costs about $50 to make. Even if they wanted a 100% (!!) profit, they still would not hit the $125 they sell it at.
Although I am quiet familiar with your mentality: Company [name here] is perfect, I love them so much, they will never take advantage of me, oh I love them so much!
All you have done is add up the cost of the parts. If this were a bag of parts, your argument might be valid. But keep in mind that someone had to design the PCB, have it manufactured (in small quantities for testing), test it, make revisions, re-spin, re-test, etc. before having a board that could be produced in large quantities for sale to you. This person likely wants to be -- and very likely was -- paid for his or her time. Given the complexity of designing and testing a board, this person's time is likely quite valuable and the per-hour costs for them is quite high. You can't just have any fool off the street do this for $10/hour. So before you spout off about how high the cost of something is, please know what it is you're talking about. It does NOT cost Sparkfun $50 to make. It costs them $50 in parts. $50 in parts and $50 to make are completely different things.
Hey what voltage regulator is on this board? I need the part number, thanks in advance
It's a MIC5205, 3.3V version.
The link on the product page tot he "updated code" doesn't help much since it is only for the ITG-3200.
Searching around, I found that some folks over in Berlin ( the "Quality and Usability lab at Deutsche Telekom AG"!) have released a newer code base as a complete package that uses the ITG-3200.
It works beautifully. Maybe Sparkfun could link it above? https://dev.qu.tu-berlin.de/projects/sf-razor-9dof-ahrs/files
Would you mind telling me what the difference is between this one and the one here: http://www.sparkfun.com/products/10736 ?
Thank you
What is the temperature operating range of this device?
scratch that, it's -30 to 85.
I wonder if anybody else encountered this problem.
By David's update, everything is fine. I think, I need to change some constants, however...
Now the problem is, the Yaw angle is not really reliable. The magnetometer data change when the board's position is changed while it's orientation is kept constant.
for example, if I mechanically keep yaw/pitch/roll constant, and I just move the board on the edge of my table, in different direction, the yaw angle (amagnetometer data in the detailed data), changes...
it shouldn't be the case, should it?!
Hi
I bought 9 degree of freedom- razor imu from LEXTRONIC (distributor of sparkfun) in 03/09/2010 my reference number is SEN-09623 and the version of my board (back of pcb) is 12/28/09 and I think my schematic ‘s version is V14 because I saw LPR530 and LY530 on my board replace ITG-3200?! Is it bad?
2. I want to start then I am tyro, please help me to start.
3. I want to connect my imu with ft232 to PC , please send me monitoring software
4. Please help me to develop IMU with kalman filter
5. Where I can download the source code of razor ?
6. We have to upload new Avr code. Is it correct?
Mersi
turlan1979@yahoo.fr
Hi guys, my mag readings are all -32. Would that result in a bad chip? The rest of the board is working fine.
Is anyone from Sparkfun able to provide an estimate on when this will be in stock again, and/or let us know whether the limiting factor is a particular part or just assembly bandwidth? Thanks!
We are almost done. I can say that we should be able to get the new version on the website before the weekend. Stay tuned. We're working on it.
I too was wondering the status of a new IMU??? Any luck...
We had a shortage of some parts and they showed up late. We SHOULD be able to have this very very soon. Sorry everyone, it seems that once we get one IC in stock, we run out of another.
Correct me if I am wrong. It seemed to me that the pre-loaded code gave raw values correctly, at leant no "zero" values.
The AHRS code base, couldn't give the gyro values: they are apparently all zeros.
Now, I see this updated code, which I assume is to communicate with the gyros properly.
Now, there is a need to combine these codes, and use the board properly, at last.
I wonder if anybody have done so already? Please email me mortezahaydari at yahoo dot com. Althu I love to play with these boards, and learn a lot, and the work is very well appreciated, my very goal of buying it was to USE it, as my deadlines are very tight, and I really can't afford the time to fix these stuff myself.
Can anybody help a little bit!
problem solved by David's updte.
Am I missing something or is there no data sheet for the whole package? I only see datasheets for the individual ICs on the board. A mechanical drawing would be helpful.
Thanks
There are Eagle Files. Use the "info" command to see the various component positions and information. Or, if you want, I can get some measurements from the designs for you. Just reply with which measurements you need.
Just some general hints on getting the ahrs code to work.
1. The gryo is a different sensor and is now connected via i2c. you can use this http://code.google.com/p/itg-3200driver/ to interface with it and pull the correct data. Make sure you use the correct address (0x69 i think). The code above has it own offset calculation so use this instead. Essentially you will no longer use adc.pde .
2. Examine the axes for all of the sensors, to me it appears that all of the axes are aligned together so you need to edit some of the i2c code(specifically the x and y of the acclerometer and magnetometer are switch) and SENSOR_SIGN in the main code.
Hi,
Is there any way to increase the fps of AHRS code? I would need like 100Hz, instead of the normal 50Hz. Is this possible? How can i change the code to obtain that?
Regards.
It seems that nobody's looking for an updated firmware version anymore... Have you guys found one ?
How to add a GPS receiver?
According to this discussion
http://www.sparkfun.com/products/9623
it can be done.
Anyone have the code please?
Anyone done this with the AHRS code?
http://code.google.com/p/sf9domahrs/
Would be so cool to also have GPS data.
this looks interesting, it looks like you could add a GPS to this IMU
http://blog.ckdevices.com/?p=66
and it sounds like they have AHRS code too, but I don't see a price
Hi Simon,
looks like things are under a lot of development right now:
Example Code:
We are working on example code that shows how to add servos for image stabilization, as well as code that shows how to add a GPS to the user IO pins. Say tuned.
Source:
http://store.ckdevices.com/products/Mongoose-9DoF-IMU-with-Barometric-Pressure-Sensor-.html
I will see how they do.
Adding a GPS receiver directly to an "user IO pin" would be totally sufficient for my case.
The Sparkfun 9DOF board is on backorder right now anyway.
Jan
Random question: anyone know how much this weighs?
3.52 ounces.
Great product as usual, even though I've seen comments that the accelerometers/gyros included are too noisy for a quadcopter.
Here's my experience with this board:
http://trandi.wordpress.com/2011/01/03/razor-9dof-imu-i2c-to-arduino/
While attempting to build a quadcopter:
http://trandi.wordpress.com/2011/03/29/quadcopter-home-made/
Now, the quadcopter doesn't really fly, but this might be for 100 other reasons (not the least my inexperience !) so it doesn't prove anything...
Has anybody else had any similar experiences ?
thanks,
dan
Isn't the HMC5843 obsolete? When Sparkfun redesigned this board last month, wouldn't it have been better to replace this part with something else, like the HMC5883L? And what about the code? There isn't any code for it!
Those went fast! I guess I don't get one just yet. Any idea of when you will have more back in stock?
my complaint is they have redesigned this board because the old version was flawed, but they won't admit it. On the comments for the old board: http://www.sparkfun.com/products/9623 I was told they new board was being put in place because the magnetometer was being changed, and not to fix any problems with the design. Now the new board is out with the same chip, and a new design for the board. I'm sorry sparkfun but you have lost a customer because your products are consistently flawed and you are dishonest. You have earned quite a lot of good-will in the community and it is unfortunate to see you spend it so irresponsibly.
I had an elaborate discussion with the Sparkfun's technical team on the magnetometer issue and what we figured out was that the problem was related to the layout and power supply of the board and not the magnetometer itself! You can check out the problem and IMU's behavior here on my YouTube Channel :-
9DoF Razor IMU from SparkFun Malfunctioning
Go through the video's description to understand what was happening and this is how I made it work (read the video description):-
9DoF Razor IMU from SparkFun Functioning Properly
Don't dump Sparkfun so early, I am sure they must have rectified the power supply and layout issue (which was affecting the magnetometer output) in this new version.
SparkFun 9DoF Razor IMU Made Easy
Hi,
I have the same problem, with the yaw angle. It sticks to one value,
but I don't exactly understand what you say about how to fix the problem?
-I am using the 3.3V FTDI board, and that's it, no extra wires connected.
Now, how should I change it?
-use an adaptor (5 or 3.3v?), and connect it directly to the board's power pins?
What was the flaw of the original board?
has anyone started adapting the AHRS code to work with the new version of this board? everything seems to work except the gyroscope code needs to be updated for the ITG-3200 I2C
Can anybody told me the static accuracy and the angular resolution of this IMU ?
Thanks.
what voltage regulator is this one that this boards use?
Its 150mA Micrel regulator.
MIC5205
SparkFun 9DoF Razor IMU Made Easy
Te recommended 3.3V FTDI Basic Breakout is marked as "Retired" on the store.
why the maximum baud rate is 57600? whats a problem change the Baud rate to 115200?
Might be because the ATMega series, using 8MHz & 16MHz crystals, doesn't have a UART that can get closer than 3% clock skew at 115K. Many serial devices will not talk to a device that far out of spec.
What is with all the complaints about pricing all of a sudden? If you don't like the price, set out and make your own. You will find out that you will be extremely hard pressed to save a buck and may realize the little you saved does not make up for the convenience of buying something ready to go. Buy enough parts to make 20 or 30 of them yourself and sell the rest on a forum.
The costs of doing business, payroll, rent, insurance, advertising, equipment, taxes, etc is astounding for any business the size of Spark Fun.
You can always save a buck by buying something that is made by child labor with poor quality control and no customer service.
Here's a nice tutorial I wrote some time back to get this IMU working (the older version), newbies will find it useful :-
SparkFun 9DoF Razor IMU Made Easy
ADXL345 link points to ADXL335.
The link is working correctly for me, but here is the datasheet from the company's site.
Is there any good examples of code out there to receive the data string on another Arduino for processing( i.e control servos)? I never seem to be able to receive & process data strings well.
Beemer, I use the older version of this board, but I assume it's the same concept.
Here is a video of the mod I made to verify the data integrity sent over serial to an arduino.The page also includes my receiving code:
http://www.infohole.com/blog/robotics/verifying-integrity-of-9dof-data-sent-to-arduino-mega/
Are there any pins free in the AVR?
Is there a way to access them?
I would like to drive a 7 segment but it seems that I would have to connect to other micro.
Yes. The following pins are open: PB0-PB2, PD2-PD7, PC0-PC3, and PC6-PC7. You could solder some wirewrap wire onto the free pins according to the pinout on the datasheet.
Will the AHRS code work with the new part? Are you shipping one to Jordi to get support? Inquiring minds want to know.
It should. Let me test it out and get back to you.
Any progress on this? I can't decide to buy until I know it will work.
it currently doesn't support the new gyroscope. i've been working on and off at adding this myself, but this is my first stab at I2C and i'm not making a whole lot of progress. would be great if we could get some help from sparkfun updating the AHRS code
Any luck? I'm about to tackle this, but if you have made progress it's always better to avoid re-inventing the wheel.
eurgh, no, i haven't been able to read from the gyro. somebody posted that they'd updated the AHRS code and offered to share it, but that post is missing now. anybody know anything about that?
Still no baro or temp? Would it have been that hard to add them?
It wouldn't be hard, but it would increase the cost and size of the board. Anyways, barometers and temperature sensors often need to be located off board. Especially on quadcopters.
isn't there a temperature sensor on the gyroscope?
this is an amazing board... 9DOF in a 3 cm x 4 cm board
unfortunatelly I can't afford it :S
Schematic only has sheet one of two. Please include sheet two also.
Oops, I'll get that fixed, sorry. Silly default Eagle settings!!!