Rotary Encoder
COM-09117

Rotary Encoder
SKU: COM-09117
$4.50
In stock
SKU
COM-09117
Product Overview
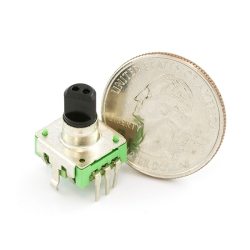
This is a 12-step rotary encoder with a nice 'clicking' feel. It's breadboard friendly, and has a pretty handy select switch (by pushing in on the knob). The encoder is different from a potentiometer in that an encoder has full rotation without limits. The unit outputs gray code so that you can tell how much and in which direction the encoder has been turned.
This unit does not come with a knob, but a working knob is related below.
Documents:
- Datasheet
- Rotary Encoder Tutorial and Arduino Project.
- Example Arduino Project.
- Example Cooking Timer
- bildr Tutorial
Similar Items





Hookup Accessories




Documentation
- Bildr example showing how to use an encoder in Arduino
- Rotary Encoder Tutorial and Arduino Project
- Example Arduino Project
- Example Cooking Timer
- Datasheet
Customer Reviews
Rotary Encoder
$4.50
COM-09117
Stock and Customer Discounts
$4.5 retail price.