- Home
- Product Categories
- Robotics Kits
- Wild Thumper 6WD Chassis - Black (34:1 gear ratio)







{kind=link}
Wild Thumper 6WD Chassis - Black (34:1 gear ratio)
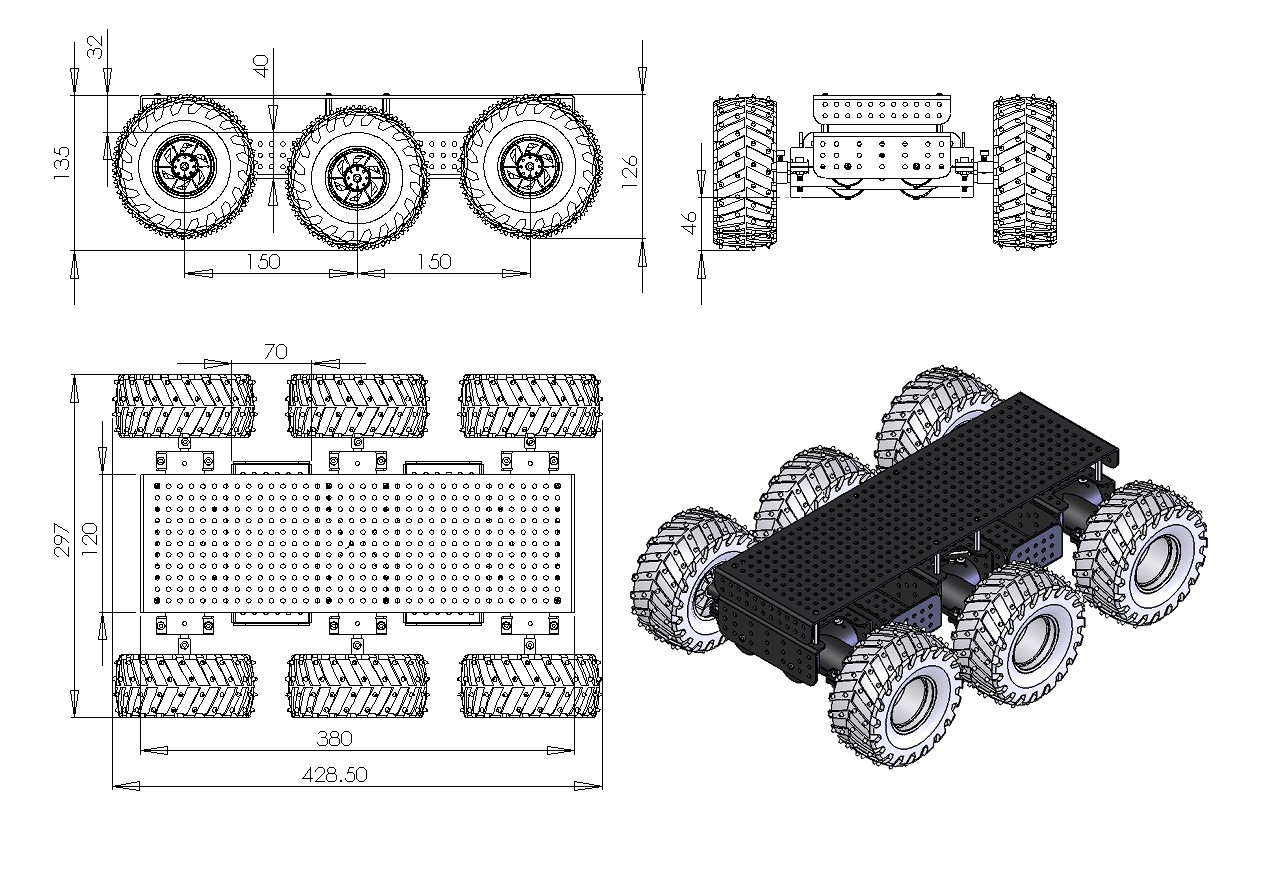
This is easily the most rugged and beefy robot chassis in its price range. The Wild Thumper 6-Wheel platform is the best of both worlds: It takes almost no time to go from un-boxing to rolling chassis, but it's also ready to be expanded on and makes great base stock for a serious 'bot.
Each of the six motors are mounted on independent suspension and outfitted with 34:1 steel gearboxes (no more stripped gears!). The motors are wired together on a terminal strip inside the 2mm thick anodized metal frame and can be controlled on two channels (left and right). The entire chassis is perforated with 10mm pitched, 4mm diameter mounting holes and there is plenty of room interior to the chassis for batteries, drivers and other support hardware. The chassis comes with 6 of those gnarly Dagu 120mm off-road wheels.
Because there are six motors total, each channel of your motor driver will need to be able to supply a decent amount of current to get things moving. This is a differential drive platform, meaning that a turn in accomplished by simply driving one side faster or slower than the other, or turning the two sides in opposite directions. Because the "pivot point" of this turn is essentially made up of the opposing three tires a gradual turn will require less power than a sharp one and the more power you can source, the more maneuverable your platform will be.
We have had success driving this platform with the SparkFun Monster Moto Shield, it can be found in the Hookup Accessories section below.
- "Super Twist" suspension keeps all your tires on the ground even on rough terrain
- Spiked 120mm off-road wheels are super 'grippy'
- 6 x 7.2v DC motors with 34:1 steel gearboxes
- 10mm pitched mounting holes
- Made from sturdy 2mm thick plate aluminum
- Recommended voltage: 2-7.5v
- 420 x 300 x 130mm (16.5" x 12" x 5")
{kind=link}
{kind=link}
Wild Thumper 6WD Chassis - Black (34:1 gear ratio) Product Help and Resources
Core Skill: Robotics
This skill concerns mechanical and robotics knowledge. You may need to know how mechanical parts interact, how motors work, or how to use motor drivers and controllers.
Skill Level: Rookie - You will be required to know some basics about motors, basic motor drivers and how simple robotic motion can be accomplished.
See all skill levels
Core Skill: DIY
Whether it's for assembling a kit, hacking an enclosure, or creating your own parts; the DIY skill is all about knowing how to use tools and the techniques associated with them.
Skill Level: Rookie - Basic hand tools are required and instructions will allow more freedom. You may need to make your own decisions on design. If sewing is required, it will be free-form.
See all skill levels
Core Skill: Electrical Prototyping
If it requires power, you need to know how much, what all the pins do, and how to hook it up. You may need to reference datasheets, schematics, and know the ins and outs of electronics.
Skill Level: Rookie - You may be required to know a bit more about the component, such as orientation, or how to hook it up, in addition to power requirements. You will need to understand polarized components.
See all skill levels
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
4.5 out of 5
Based on 4 ratings:
1 of 1 found this helpful:
Excellent platform for rc or robotics!
There's plenty of room for batteries and controller. Lots of holes for mounting almost anything within reason.
1 of 2 found this helpful:
Great frame, Weak axels
The frame is great as it has lots of room for batteries and other stuff and it's fully customizable so you can interchange parts however you like.
The axel coming from the gear-box is really weak. When the internal part of the axel breaks (and it will) it results in a lot of unusual play.
Other than that, this is a great product. Just not worth the steep price.
Awesome Chasis for my Project
Im currently overseas in iraq and i started a project that invloved this product to take my mind off other stuff. I have actually ordered another one of these a few months back and the reason why i bought another one is when i was programing it i set the motor speed to 255 and went forward and back real quick and it broke 3 of the pins that run through the motors since it couldnt handle the torque i think (motors now set to 140). I have since learned my lesson and set them lower. It now works like a charm I love it.
You can use this chassis with ArduPilot 2.6?
Maximum payload is about 5kg with the 34:1 gear ratio.
What does this thing weigh?
8.54 lbs. (US) or 3.87 Kg including the box and everything that comes with it.
does this have brushless or brushed motors? in other words, do you have to break these in before they will really work?
I recently bought this and it was great for a total of about 5 minutes. The first 2 times I tried it the TRex controller went bad. Completely failed. Then I bought a sabertooth which was MUCH better quality and seems to run fine. Unfortunately one of the wheel motors is bad. The shaft the wheel mounts on will not spin and is almost loos enough to pull out of the motor. I can wiggle it with my fingers when no wheel is attached. I am hoping I can get new motors. I really like the chassis but I guess I expected more than 5 minutes of use before a failure. I haven't even been able to take it outside yet. Makes me wonder if the motors will continue to fail.
мой проект http://roboforum.ru/forum10/topic14711.html?sid=0b46720d88e69be644eefc3b68d184f9
Is it possible to add chains to it?
what battery would anyone suggest? would the 7.4V 1000mAh battery in the suggestions be enough?
Depending on your Motor Controller this could be enough. If you are to use a T'rex Motor Controller with the low voltage jumper enabled, it will work.
If you have more questions about batteries and RC applications, here's a good resource: http://www.rcgroups.com/forums/showthread.php?t=209187
Even though it's specifically about LiPo batteries, the fundamentals are basically the same. The Key characteristics to keep in mind are the voltage ratings (V), Amp capacity (mAh), and discharge rate [ C ].
Does anyone know if this would work with actobotics parts? If not is there any kind of standoff or something that I could use to make it work? Thanks in advance.
awesome
Is it correct to say that the 75:1 gear ratio will consume less power at the same RPM with the same payload v.s. the 34:1 gear ratio? I am trying to bring the power consumption down as much as I can, giving up top speed is not an issue for me.
Both Wild Thumper and Trex appear to be helpless if they are flipped on their back. Is this true ?
I noticed that the new T-Rex controller has inputs for rotary encoders. Is there any good way to work an encoder into this chassis?
There are places that sell these same Dagu motors with built in encoders. I presume these could be swapped out for the middle two motors (least likely to slip).
Hello guys,
I would like to ask if there is any spec sheet with the pins-out of the motors. I can see that there are 4 pins for the left side and 4 for the right (red-black-white-yellow) but I don't know where to connect them on the "Wild Thumper Controller Board".
Thanks in advance,
Sotiris
Just got a Wild Thumper 6WD! I installed a Wild Thumper Controller connected to an old AM Futaba radio control unit. Works great, drinks amps, over-eager on those controls so careful with that stick!
I am building a walk-beside robot. Initial (day 1) testing reveals a speed of about 4MPH up a paved 15 degree incline using 7.2V NiMH (34:1 gear ratio). Certainly fast enough for my 3.6 MPH exercise pace. It is VERY responsive to my slightly sloppy control stick movements. It'll pop a wheelie! This will not be a factor when directly controlled by my forthcoming sensor/microcontroller piloting system. I will be able to programmaticly smooth out control changes and maybe even create an amp-saving econo-mode matching motion to my modest personal walking strides.
Out of box trouble. Motors ran slow, very astable, jumping about, rough running and it worried me. I connected my PC, downloaded the stock demo program and that resolved all motor controller errors. Night and day difference and runs wonderfully now.
Happy motoring! ServoHawk - Boston, MA
I hooked this beast up with 2x12 Sabertooth and 6000mAh 2S Lipo.It was quite fun but sadly after one day(!) two motors went dead.Is there some problem with 2S Lipo or did I had just some bad luck?
2 of my motors are dead from the box. The controller (Dagu Wild Thumper controller) detects no battery, smoked when tried to charge and blew a fuse for no reason running the diagnostic test. PCB mounted and tightened bent)...
Dead motors spin somewhat, but zero torque. Pololu has the motors for $20 each. Hope they are a little better.
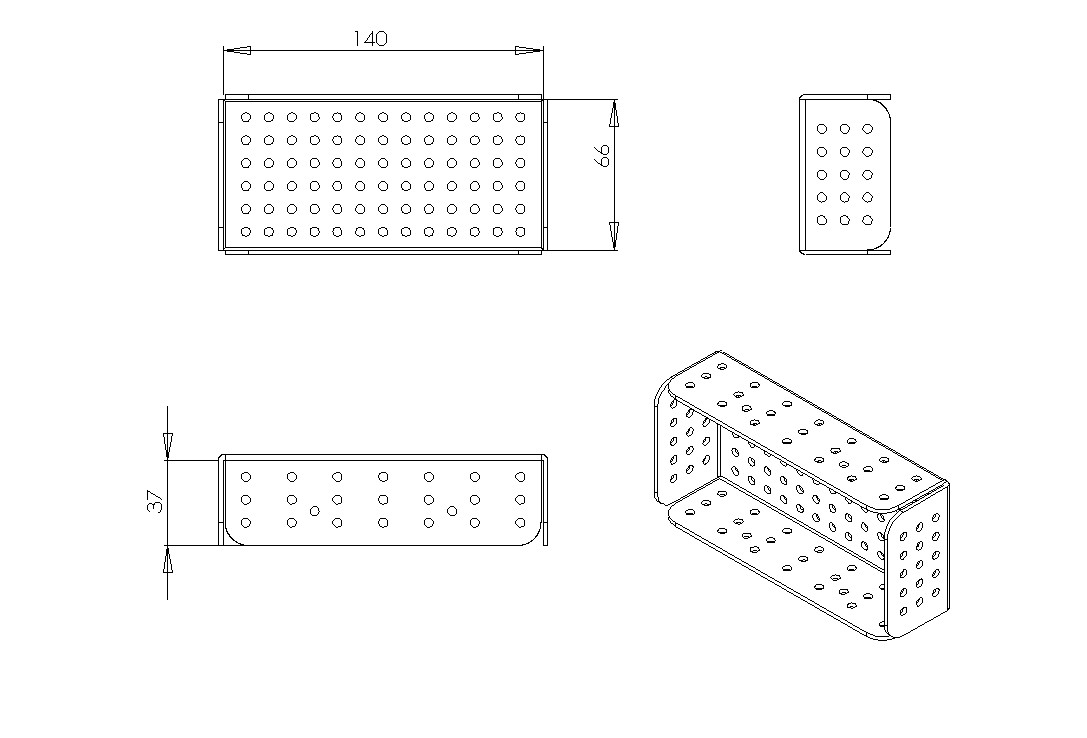
Can you post some inside dimensions of the interior compartments? Just trying to figure out battery placement and/or selection, and I figure that's where they'll be going to keep the CG low.
Edit: I see the basket drawing now, thanks. Looks like these batteries would be a good fit... http://www.all-battery.com/72v3800mahflatnimhhighpower38adrainratebatterypackswithtamiyaconnectorsforrccarsandsumorobots.aspx either fill one basket with this and the other basket for drive electronics, or move those to the deck and put in two, one per basket...
How does it handle water or snow? Are the motors sealed?
not really sealed, but incased
What size standoffs does the frame use? One of mine snapped & of course, we do not have it in Alaska...
First, this thing is fantastic & well-built, I love it!
Now, on to powering this thing. It's been years since I've dealt with the formula to compute total power requirements, so I am really messing things up trying to figure this out.
Is the "free-run" 450mA the nominal draw when the motor is in use? Or, would I have to figure power requirements from the maximum draw of 6A?
I'd suggest looking more at the 6A figure. Motors draw a lot of current when they encounter resistance. This thing can draw a LOT of current. Go overboard instead of starving it for power.
Using those figures, here's what I come up with:
P = IxV = (6x3)x6 = 18x6 = 108 Watts
That's outrageous! 18A constant supply, I cannot find a battery that will fit that requirement AND fit on the body.
Right now, I have 6V @ 7Ah. 7Ah/20 = 0.35Ah constant supply. Not even close...
I saw somebody use sub-C type battery packs with 5Ah rating... how in the world are we supposed to supply power to this thing without weighing it down (i.e., SLA), or spending a small fortune (LiPo, LiFe, etc)?
We used one of these and it worked just fine. 6A is peak. You need to be able to provide that for peak levels, but the nominal is going to be lower.
Any of the batteries listed below in the relateds should work. Just make sure your max discharge rate can handle about 6A and you should be just fine. Then pick the capacity based on how long you want it to run, based on the ~450mA rating.
Robert, can the battery you used (and included the link for) be charged by the onboard charger functionality of the Wild Thumper Controller board? I'm trying to pick a good battery to use for the chassis I just got (along with a Wild Thumper Controller board). Thanks.
No, you will need your own charger, this one
Thank you, RobertC, for the reply. How long a run time do you get for the 2200mA rating?
this would be of no help to you really. we were driving over rough terrain, spinning it in circles, etc. driving conditions will GREATLY change the overall run-time. we had it going for about an hour or more, but if you were running a course with it, it could probably go a lot longer.
Hello
I want to mount a 10" laptop and a kinect on top of this chassis. So is it possible to get a wider/longer metal covering for this chasis or simply wider/longer chassis?
Is this chassis VEX friendly, another words: is the distance between the holes in this chassis is the same as in the VEX?
What are the best batteries for this chassis?
Thanks in advance.
after reading up a little more about this platform on other places around the web, i am gald to see the wheel mounting system can accept any standard 12mm hex R/C wheel and tire combo! nice touch!
Looking at the motor datasheet and the size of the wheels, looks like it tops out at around 4mph. Can the motor housings be opened up and can you replace the gearmotors with direct-drive brushless motors to hopefully allow much higher speeds? I want to take it downhill skiing with me.
ah just spent my free day winnings towards this instead of a million smaller things. Figured if I had the platform I could build up on it over time.
Thought this was relevant. Chassis being used: http://www.engadget.com/2012/03/05/beetlecams-back-with-armor-on-board-and-it-brought-a-friend-pa/
will you be selling the 4 wheel version?
possibly. if we get enough interested, we may carry the 4 wheel version.
seconded on the 4 wheel version!
third-ed!
You could just take out the center section of the chassis, As it sits higher than the others.
What wires do I need to order to connect the LiPo battery PRT-10471 to the wild thumper motor controller? What wires do I need to connect this motor controller to the terminals on the wild thumper chassis ROB-11056?
Check the documentation for the motor controller, they have all the diagrams in there.
Pololu sells a version of the gearmotor with an integrated encoder. Will gearmotors with integrated encoders fit in the Wild Thumper's motor housings?
No, they will not fit. Here at RoboSavvy we have a 4WD to play for about one year and the back of the standard motor already hits the motor housing.
You can check here more videos of a remote controlled 6WD with camera http://robosavvy.com/forum/viewtopic.php?t=7366
Look here for the motors used in this: http://www.pololu.com/catalog/product/1573
Hopefully that helps for those looking to carry out some calculations...
Key specs at 6 V: 285 RPM and 450 mA free-run, 60 oz-in (4.3 kg-cm) and 6 A stall.
Any chance of getting some 3d models for this?
Would it be possible to get motor/gearbox specifications beyond recommended voltage? Such as stall current/torque, free speed, free current, etc.?
from other shop with this item: Stall current at 7.2 V: 6.6 A per motor No-load current at 7.2 V: 420 mA per motor
so I am not sure if the Wild Thumper Controller Board with 15A per channel is good enough to drive 3x6.6A at stall...
http://www.youtube.com/watch?v=Mjb8qElt5P8
Chassis weighs just over 2kg. -very strong ,versatile, a lot of space ,make all the money
very cool platform, as shown on the video (rc setup, controller etc) are we talking TCO around $400?
Before i blow something up when i buy one of these, can I get a recommendation getting max battery power and life? 6 motors seems like a lot to drive, and I don't have any experience with how quickly that might drain a battery or what batteries to use. If i use multiple 7.2v rc battery packs in parallel, what problems might I encounter in terms of keeping them balanced? Let's assume that i am taking each out and charging individually.
Hehe remember your basic electronic lessons ? If you connect minuses and pluses together (as in parallel wiring), you have the exact same voltage for all your packs, so no balancing problems there.
Balancing issues are only relevant for serially wired cells, which is what you will probably have inside each 7.2V packs, but at this voltage I assume you're talking about Ni based chemistry and no balancing issues there to be concerned with either.
So to sum things up, you don't have to charge the packs separately ;)
If the packs are not extremely well balanced putting 2 packs in parallel will increase self discharge. Better to use a single larger pack.
I may have to get one of these to play around with, but that will have to wait until I have more time.
Is it just me, or does it look like 2 of the 6 wheels in the picture are backwards... I don't care, I still want one ;)
Nooooo... 4 of the 6 wheels in the picture are backwards! I can't stand half-full types... Hehehe
Those motors seem to move the bot at a pretty good clip. I wonder how much over-voltage abuse they can take.
5 of the 6 wheels in the picture are upside down.