- Home
- Product Categories
- Robotics Kits
- SparkFun JetBot AI Kit Powered by NVIDIA Jetson Nano






{kind=link}
SparkFun JetBot AI Kit Powered by NVIDIA Jetson Nano
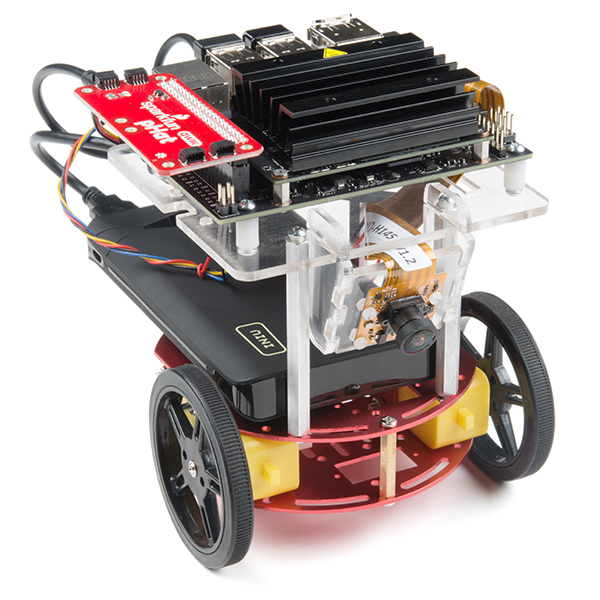
The SparkFun JetBot AI Kit is a robot platform powered by the Jetson Nano Developer Kit by NVIDIA. This SparkFun kit is based on the open-source NVIDIA JetBot! We understand that not everyone has access to multiple 3D printers on each floor, and a whole warehouse of electronics so we wanted to build a kit from ready to assemble parts to get you up and running as quickly as possible. The SparkFun JetBot AI Kit is a great launchpad for creating entirely new AI projects for makers, students and enthusiasts who are interested in learning AI and building fun applications. It’s straightforward to set up and use and is compatible with many popular accessories. Several interactive tutorials show you how to harness the power of AI to teach the SparkFun JetBot to follow objects, avoid collisions and more. The Jetson Nano Developer Kit offers useful tools like the Jetson GPIO Python library, and is compatible with common sensors and peripherals; including some new python compatibility with the SparkFun Qwiic ecosystem.
Delivered with the advanced functionality of JetBot ROS (Robot Operating System) and AWS RoboMaker Ready with AWS IoT Greengrass already installed. SparkFun’s JetBot AI Kit is the only kit currently on the market ready to move beyond the standard JetBot examples and into the world of connected and intelligent robotics. Many other popular AI frameworks popular AI frameworks like TensorFlow, PyTorch, Caffe, and MXNet are supported, and Jetson Nano is capable of running multiple neural networks in parallel to process data and drive action. Please be aware that the ability to run multiple neural networks in parallel may only be possible with a full 5V-4A power supply.
This kit includes everything you need to get started with JetBot minus a Phillips head screwdriver, a basic soldering setup, and an Ubuntu desktop GUI. If you need these, check out the includes tabs for some suggestions from our catalog.
- NVIDIA Jetson Nano Developer Kit
- 64GB MicroSD card - Pre-flashed SparkFun JetBot image:
- Nvidia Jetbot base image with the following installed:
- SparkFun Qwiic python library package
- Driver for Edimax WiFi adapter
- Greengrass
- Jetbot ROS
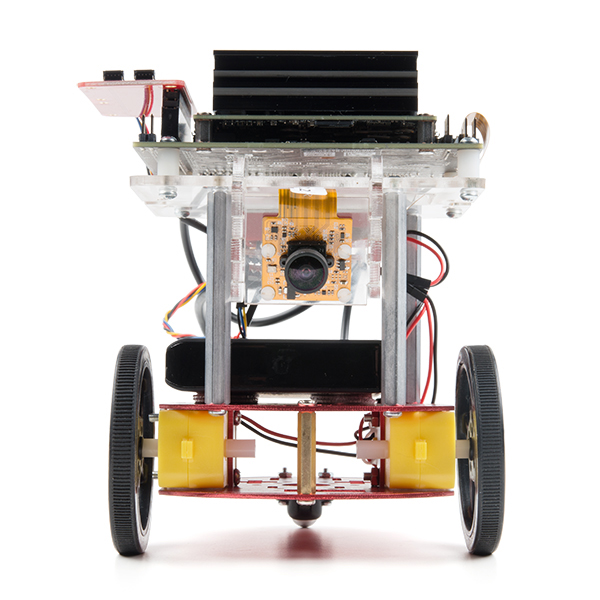
- Leopard Imaging 145FOV wide angle camera & ribbon cable
- EDIMAX WiFi Adapter
- SparkFun Serial Controlled Motor Driver
- SparkFun Micro OLED Breakout (Qwiic)
- All hardware & prototyping electronics needed to complete your fully functional robot!
- Note - some soldering & a Phillips head screwdriver is required for assembly
Items not Included but you will need:
- USB keyboard and mouse
- Computer display (either HDMI or DP) & connector cable
- SparkFun Qwiic ecosystem for I2C communication from Jetson Nano Dev Kit
- Ecosystem can be expanded using 4x Qwiic connectors on GPIO header
- Example Code for:Basic Motion, Teleoperation, Collision avoidance, & Object Following
- Compact form factor to optimize existing neural net from NVIDIA
- 145° FOV camera for machine vision
- Pre-flashed microSD card
- Chassis assembly offers expandable architecture
- Getting Started With Jetson Nano Developer Kit
- Assembly Guide for SparkFun JetBot AI Kit
- Jetbot Image (v01-00)
- SparkFun Hookup Guide for Serial Controlled Motor Driver
- SparkFun Hookup Guide for Micro OLED (Qwiic)
- SparkFun Hookup Guide for Qwiic pHAT
- Jetbot ROS GitHub Repository
- Getting Started with AWS IoT Greengrass
- Deploying Robotic Applications Using Machine Learning with Nvidia JetBot and AWS RoboMaker
- NVIDIA Jetson Forums
- NVIDIA JetBot GitHub Issues
- NVIDIA JetBot GitHub
- NVIDIA JetBot GitHub Wiki
- NVIDIA JetBot Software Setup
SparkFun JetBot AI Kit Powered by NVIDIA Jetson Nano Product Help and Resources
Assembly Guide for SparkFun JetBot AI Kit V2.0
March 27, 2020
Assembly Guide for the SparkFun JetBot AI Kit v2.0. This tutorial includes photos & comments to assemble the two-layer chassis & additional components unique to the JetBot kit.
Core Skill: Robotics
This skill concerns mechanical and robotics knowledge. You may need to know how mechanical parts interact, how motors work, or how to use motor drivers and controllers.
Skill Level: Competent - You may need an understanding of servo motors and how to drive them. Additionally, you may need some fundamental understanding of motor controllers.
See all skill levels
Core Skill: DIY
Whether it's for assembling a kit, hacking an enclosure, or creating your own parts; the DIY skill is all about knowing how to use tools and the techniques associated with them.
Skill Level: Rookie - Basic hand tools are required and instructions will allow more freedom. You may need to make your own decisions on design. If sewing is required, it will be free-form.
See all skill levels
Core Skill: Programming
If a board needs code or communicates somehow, you're going to need to know how to program or interface with it. The programming skill is all about communication and code.
Skill Level: Experienced - You will require a firm understanding of programming, the programming toolchain, and may have to make decisions on programming software or language. You may need to decipher a proprietary or specialized communication protocol. A logic analyzer might be necessary.
See all skill levels
Core Skill: Electrical Prototyping
If it requires power, you need to know how much, what all the pins do, and how to hook it up. You may need to reference datasheets, schematics, and know the ins and outs of electronics.
Skill Level: Rookie - You may be required to know a bit more about the component, such as orientation, or how to hook it up, in addition to power requirements. You will need to understand polarized components.
See all skill levels
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
4.3 out of 5
Based on 4 ratings:
1 of 1 found this helpful:
Decent, ran into two issues
First: if you do buy one, read the jetbot assembly instructions before you do any of the instructions included in the Jetson Nano box! (Basically, the SDHC card is already flashed. Don't install NVIDIA's image.)
I assembled it in less than a day. It does require soldering, so I needed to brush up on that. I've run it with some of the examples. It comes with a Jupyter notebook with examples that are clear. Seems to be fully functioning. (The cats were very interested.)
Now for the two areas that could be improved. The WiFi driver doesn't work at boot up. Reloading the driver ("sudo rmmod 8723bu" followed by "sudo modprobe rtl8723bu") seems to get the driver working correctly. I haven't figured out how to do this automatically post-boot, so I have to hook the Jetson Nano to a monitor/keyboard/mouse before being able to do this. I suspect connecting the Jetson to Wired ethernet would let you log in from another device to reload the wifi driver, without keyboard/video/mouse. Second issue: the bot doesn't have a front bumper. If it runs into something -- and it will -- the camera will take the impact.
Great quality kit and customer support
With a little bit of elbow grease and easy follow written and video instructions, the kit can be built with lease efforts. It come with everything you need to get the system up and running in no time. What's even greater is that you don't need to worry about customer support in comparison to overseas based companies'. SparkFun has by far the most responsive email support and it ships out any replacement parts in no time if necessary. I am highly impressed by both product quality and customer support (especially many thanks to Chris F.)
Thus far a great kit to meet our needs!
We have only just completed the assembly of this kit for a research project with NASA, so we could say more after a few months of use.
The assembly was clear by the instructions and straight forward. Our only issue thus far ... the Velco substitute is interesting, but is difficult to make attach properly. We have replaced this with Velco for ease and security. The kit booted immediately and we were on a desktop getting setup easily and quickly.
From our understanding of the capacity of the Jetbot, this will be exciting and easy to use. More in the future!
Jury is still out.
Nano works fine in standalone, (W/128 Gig card) does not boot in Bot mode, have downloaded the Zip file twice to make sure there was no corruption in transit, Etcher app chokes on the .ZIP file, suspect the archive has a problem. Plex plate for Camera mount needs 2 small recesses to allow the PC board of the Camera to lay flat. I think the Velcro for the Battery is far too stiff and would try replacing it with 1 in wide standard glue back Hook & Pile.
Hi, Thank you for the nice kit/package. When I use the collision avoidance example, the robot does not manage to got on a straight line when is not blocked. How can I make it go straight? Thanks, Luis
If you throw up a post on our forum (that way everyone can see it), I'll take a look for the best spot to tune the controls. Its probably because the motor gearing a driver voltages aren't perfectly symmetric
Hey Luis78, I would recommend taking a look at this GitHub issue: https://github.com/NVIDIA-AI-IOT/jetbot/issues/68. Typically we see slight deviations in the motors which causes them to drive at slightly different speeds even if they are receiving the same voltage signal. About 2/3 of the way down this post "jaybdub" talks about where in the code you can modify these speeds to find what is best for your motor pair & Jetbot environment. Just a reminder that if you need help with your SparkFun product, the SFE Forums (https://forum.sparkfun.com/) will be the fastest path to a response. Cheers,
Just a heads up, the product video mentions dual 3A ports on the battery pack. However, only one of the ports outputs 3A.
Hello ,when you will be able to ship the JetBot AI kit?
WiFi?
The Jetson Nano itself does not have built-in WiFi. You need to use a WiFi USB dongle or a WiFi card in the M.2 Key E slot. This kit does include an EDIMAX WiFi (USB) Adapter, which should be listed under the Includes tab just below the product pricing.
Hi Sparkfun. Any news on when you will be able to ship the JetBot AI kit? Best regards, Martin Dybdal
We're still hoping for a July release but we don't have an exact date, yet. (I'm sure we'll probably have an announcement in our newsletter if you subscribe to that, but I haven't confirmed that detail yet.)
Does the bot have an IMU or other sensors?
It does not; unfortunately, the Jetson doesn't have an onboard IMU and all the other parts, listed under the Includes tab don't have an IMU either. However, I'm sure you could use the camera and machine learning to detect some of those changes. Otherwise, with the Qwiic pHAT, you can easily integrate and I2C based IMU like our Qwiic 9DoF (ICM-20948). There isn't a Python library built up yet for that IMU, but we are working on expanding our Python library for I2C products (hopefully it will be available soon).
No worries, I ended up grabbing an MPU-9250 breakout - I've got another Jetson-Nano-based robot (using the multi-chassis) that's using the same IMU; I'm still working on the C++ library and ROS node for it.
Does sparkfun or anyone else offer a Soundcard that has a mic that will work with the Jetbot?
The USB microphone we use for the TJbot works with the Jetson (just tested it). I'll see if we are planning on making it available for individual purchases.
If you are looking for a true computer sound card, then no we don't currently have one. There is a PCIe slot on the board, but that might be a question for the Nvidia forum on the Jetson. Otherwise, since the Jetson does have a Raspberry Pi compatible GPIO header... there are probably Raspberry HATs and audio modules that might work (we haven't tested any, yet); they just won't be true computer sound cards.
The Jetbot download includes Nvidia Juptyer notebooks and Jupyter lab so you can run the notebooks
Will the SparkFun JetBot AI Kit Powered by NVIDIA Jetson Nano be able to run the Nvidia Jetbot image and run the Nvidia Jupyter notebooks so that I can also follow their examples and code?
In short, yes.
This kit uses NVIDIA Jetson Nano and the NVIDIA Jetbot was designed to run on NVIDIA Jetson Nano. As mentioned in the comment above, the image includes the Jupyter notebooks, which run off a webpage that the Jetbot hosts. For more details, check out the Documents tab beneath the product pricing. Otherwise, if you have additional technical questions, you can use the link in the banner above to post a topic on our forums. Our technical support team will do their best to answer your technical questions.
Any chance you can offer this without the Jetson Nano for folks that already have one and don't need another?
Yes, we do have plans to carry the kit minus the Jetson Nano. We are currently trying to source a new battery for the kit and add an acrylic separator between the Jetson and the chassis.
That’s great news.