
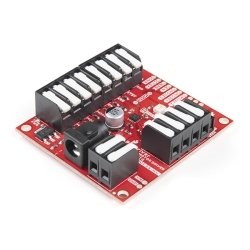
Big Easy Driver
Helpful Documentation
 Hookup Guide
Hookup Guide Schematic
Schematic Datasheet (A4988)
Datasheet (A4988)Product Overview
The Big Easy Driver, designed by Brian Schmalz, is a stepper motor driver board for bi-polar stepper motors up to a max 2A/phase. It is based on the Allegro A4988 stepper driver chip. It's the next version of the popular Easy Driver board.
Each Big Easy Driver can drive up to a max of 2A per phase of a bi-polar stepper motor. It is a chopper microstepping driver which defaults to 16 step microstepping mode. It can take a maximum motor drive voltage of around 30V, and includes on-board 5V/3.3V regulation, so only one supply is necessary. Although this board should be able to run most systems without active cooling while operating at 1.4-1.7A/phase, a heatsink is required for loads approaching 2A/phase. You can find the recommended heatsink in the related items below.
Note: This product is a collaboration with Brian Schmalz. A portion of each sales goes back to him for product support and continued development.
Features:
- Bi-polar Microstepping Driver
- 2A/Phase Max
- 1.4-1.7A/Phase w/o Heatsink
- Max Motor Drive Voltage: 30V
- On-board 5V/3.3V Regulation
Documents:















Features & Specs
- Bi-polar Microstepping Driver
- 2A/Phase Max
- 1.4-1.7A/Phase w/o Heatsink
- Max Motor Drive Voltage: 30V
- On-board 5V/3.3V Regulation
Documentation
Customer Reviews
