Hobby Gearmotor - 140 RPM (Pair)
ROB-13302
Hobby Gearmotor - 140 RPM (Pair)
SKU: ROB-13302
$7.50
In stock
SKU
ROB-13302
Helpful Documentation
 Datasheet (DG01D)
Datasheet (DG01D)Product Overview
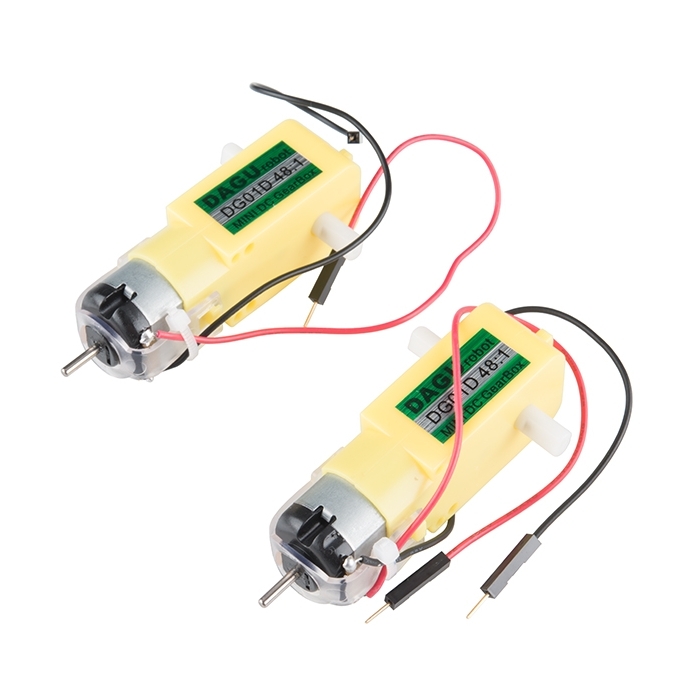
These are a pair of hobby gearmotors from DAGU. These gearmotors are the same ones recommended for use in the Shadow Chassis and offer a cheap and easy-to-use setup to get your wheels turning. Each Hobby Gearmotor also possess a 9mm long output on a straight axis.
These gearmotors require a voltage of 4.5V with a no load current of 190mA while possessing a gearbox ratio of 48:1 and a wheel speed of 140 RPM unloaded.
Every motor order is sold in packs of two.
Note: The RPM listed in the datasheet below is listed as 90RPM. Based on our own testing we found the gearmotors can actually achieve a No Load Speed of about 140 RPM.
Features:
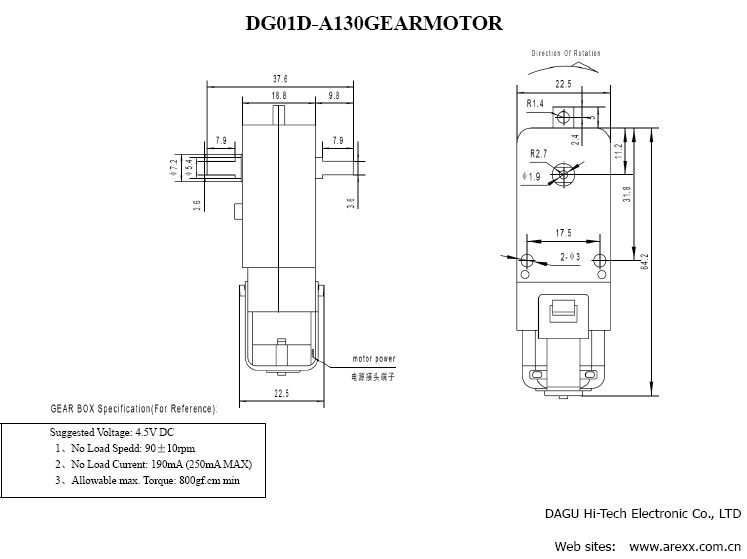
- Suggested Voltage: 4.5VDC
- No Load Speed: 140RPM
- No Load Current: 190mA
- Max. Load Current: 250mA
- Torque: 800 gf-cm
Documents:
- Datasheet (DG01D)
Similar Items







Hookup Accessories










Features & Specs
- Suggested Voltage: 4.5VDC
- No Load Speed: 140RPM
- No Load Current: 190mA
- Max. Load Current: 250mA
- Torque: 800 gf-cm
Documentation
- Datasheet (DG01D)
Customer Reviews

Hobby Gearmotor - 140 RPM (Pair)
$7.50
ROB-13302
Stock and Customer Discounts
$7.5 retail price.
Available Discounts
- $7.13 | 25+ units
- $6.75 | 100+ units