SparkFun Optical Tracking Odometry Sensor - PAA5160E1 (Qwiic)
The SparkFun Qwiic Optical Tracking Odometry Sensor empowers you to elevate a robot's navigation capabilities with precision and streamlined integration.
Helpful Documentation
 Hookup Guide
Hookup Guide Schematic
Schematic Optical Tracking Sensor - PAA5160 Datasheet
Optical Tracking Sensor - PAA5160 DatasheetProduct Overview
The SparkFun Qwiic Optical Tracking Odometry Sensor empowers you to elevate your robot's navigation capabilities with exceptional precision and streamlined integration. This compact, all-in-one sensor leverages the power of the PAA5160E1 chip from PixArt Imaging Inc., delivering accurate dual-axis motion data across various hard floor surfaces. But that's not all! This sensor boasts a powerful built-in 6-axis Inertial Measurement Unit (IMU) and an onboard microcontroller that performs real-time sensor fusion and tracking algorithms.
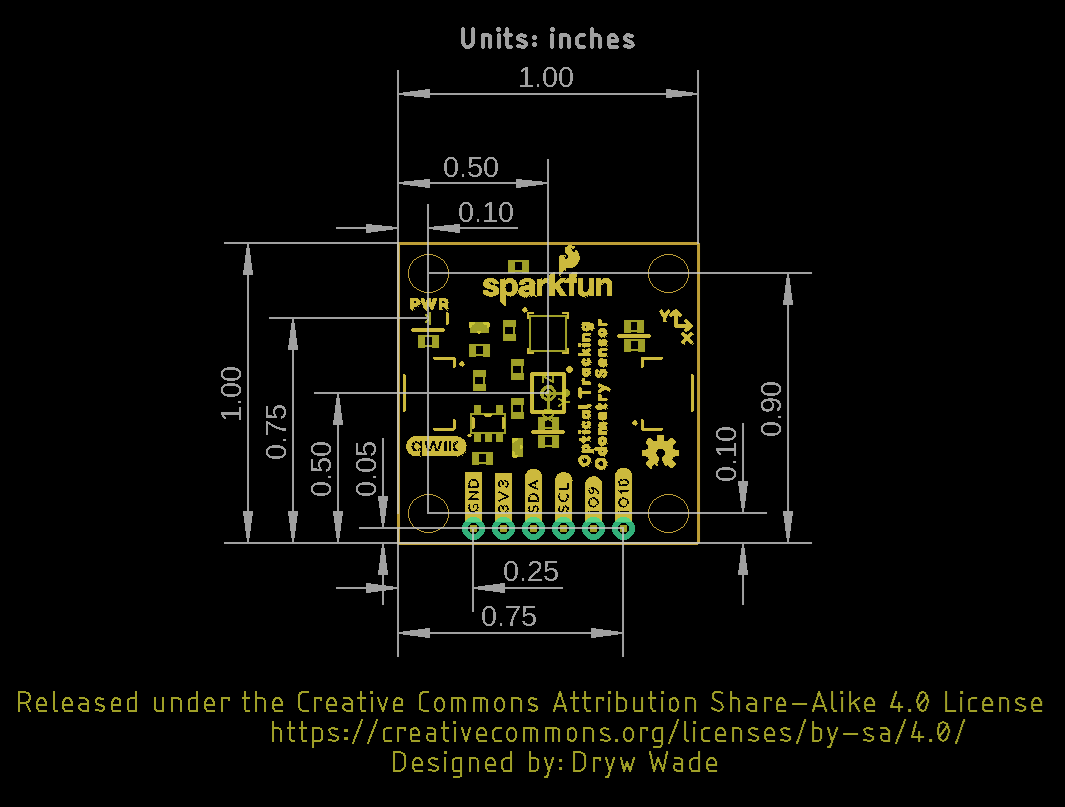
The Optical Tracking Odometry board measures a mere 1in. by 1in. and boasts a smaller profile than its industry counterparts. Unlike bulkier options that require multiple boards, this sensor features a single-board design with an onboard tracking algorithm. User-friendly Arduino and Python libraries simplify integration, quickly getting you up and running.
The PAA5160E1 chip offers exceptional tracking performance with a typical error rate of 3-5% within a working range of 10mm to 27mm (must be exactly 10mm for FTC field tiles). However, a calibration within the sensor's firmware can significantly reduce this error to under 1% in ideal conditions. This sensor excels at high-speed motion tracking of up to 2.5 meters per second, making it an excellent choice for navigating warehouse robots, commercial robots, and other fast-moving applications.
Thanks to its Qwiic compatibility, the SparkFun sensor integrates seamlessly into your XRP or other robotics projects. This user-friendly interface eliminates complex wiring configurations and simplifies connection to other Qwiic-enabled components. The included Arduino and Python libraries and the onboard tracking algorithm in the firmware streamline the development process, allowing you to focus on creating innovative robot functionalities.

Note: This is a CLASS 1 LASER PRODUCT CLASSIFIED IEC 60825-1 2014.





























Features & Specs
STM32:
- Arm® 32-bit Cortex®-M0+ CPU, frequency up to 48 MHz
- -40°C to 85°C/105°C/125°C operating temperature
- Up to 32 Kbytes of flash memory with protection
- I2C address: 0x17 (fixed)
Optical Tracking Sensor - PAA5160:
- Tracking Accuracy: 3-5%
- Tracking speed: 2.5m/s
- Working Distance to Tracking Surface: 10-27mm
- Must be exactly 10mm for FTC field tiles
- Frame Rate: 20,000 fps
6-DOF IMU Accelerometer:
- ±2/±4/±8/±16 g full scale
- ±125/±250/±500/±1000/±2000 dps full scale
{kind=link}