
The world of inflatable robotics, or soft robotics, is fascinating. Soft robotics uses fleshy materials like an elastomer, constructed with or without channels, that act as actuators hooked up to dynamic pneumatic control devices like the one shown below. This technology is changing the way we think about solving mobility problems such as gripping, walking, crawling, jumping and exploring. The possibilities for air-controlled exoskeletons to help patients suffering from muscle and skeletal disorders are wonderfully promising.
Helium-Filled Friends
I wanted to use the simplicity of the design in this field to introduce a new or younger generation of makers to sensing and exploring the world of electronics affordably with Inflatable Friends. So, here's my first crack at it.
Fin is the original creation of Pritika Nilaratna and based on her work "Ollie, the robotic blimp". Please check out her site and feel free to share under a Attribution-ShareAlike 3.0 Unported License"

This is Fin, the Electret Blimp. This project takes sound reactivity to a new level. No LEDs here!
Check out the full tutorial, his origin story and see him in action here. Fin will flap his fins wildly with excitement when he hears you. He does seem a little mopey when there isn't much going on. His blank slate appearance allows you to project a personality onto him, or you can decorate him (keep in mind you want him to float). I gave mine a pair of googly eyes.

Broken Drone? More like gonna make this balloon awesome with a broken drone.
Scuttle-Puff was an afterthought. After breaking my ProtoX mini drone I cut off each motor, exposed all the traces on the pcb and put it back together so it would fit over this balloon that was sent to me by accident. Now, I've got an RC blimp that's much more fun to play with. While it does not get lift here in Colorado because of the altitude, it does scuttle around the floor kind of hilariously.
More Soft Robotics Projects
A little compressed air can provide extended range of motion.
For anyone interested, I recommend checking out the Soft Robotics Toolkit. They also host a competition using open source resources to design soft robots that perform a needed task or solve a problem in a novel way. There are a number of files available for download, case studies, and a bill of materials for the Fluidic Control Board, parts and equipment to get you started.
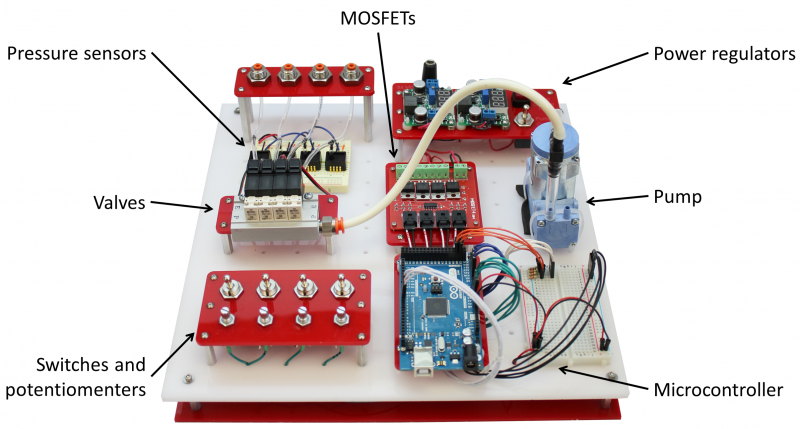
Fluidic Control Board (Photo courtesy of Soft Robotics Toolkit)
The Fluidic Control Board is automated through provided software running on an Arduino MEGA 2560. On board is a pump that provides the pressurized fluid of your choice to your system, some solenoid valves, power regulators, MOSFET power switches and, of course, pressure sensors, which are the heart of your feedback control system. Under the "Assembly" section, they even used a SparkFun tutorial to help you with the basic techniques of soldering. Sweet!
One of the winners of the Soft Robotics Competition in 2015 was this inflatable wheel. Since seeing this, my mind has been reeling with the possible applications. The video itself is unlisted, which is why I didn't include it, so please watch it on the Soft Robotics Toolkit website.
Let's see a few soft robots in action:
Squishy things in action
More squishy things in action
Fire, freeze and weight tolerant while remaining cost effective -- it may save your life one day!
Well, that was my first adventure into the inflating robotics. There's still plenty of room for improvement. And you didn't even see the failures. But it was fun, and I am inspired. I hope that soft robotics has spurred some inspiration and confidence in those who haven't yet played with robotics. It can be incredibly daunting to get into. I hope going soft at least helps you get your electronics fix while creatively solving problems.
If anyone is interested in soft robotics and would like to see a similar version of the Fluidic Control Board at SparkFun let us know!
Until next time (fist bump) "Badadadadada" (Courtesy of Giphy)







{kind=link}
I would absolutely buy a fluid control board! We all have our own design tendencies and interests. I personally would like to build a "hydraulic visualizer: and perhaps also synthesizer" suspended empty soft fluid chambers that can fill, have a airstone in the bottom and leds. So as a visual it could be a fluid waveform visual. As a synth their could be chambers that filled from above and contact mics to capture a very organic fill sound even a unique "white/wet? Noise generator. while smaller chambers with pressure sensors could set waveform parameters, strike a verb tank or any number of things. I can see a desktop "wacky waving inflatable tube man" who can dance...
Very cute! I'd love to check out the original Ollie as well but the link 404s.
I would very much like to see more Soft Robotics on Sparkfun!
I would also love to talk about integrating Soft Robotics into an engineering class I teach at CU
I would also love to talk about this. This would make an interesting and fun lab. Let me know if I can help you design this.
Now this is what I'm talking about. While the project I'm working on is not really inflatable robotics but I am using pinch valves that I found on eBay with big solenoids and I'm having to use a analog relay board to control it with and Arduino Mega and it would be nice to actually see a board that contains a mega and multiple solid state relays or some kind of Shield that contains more than just a couple of relays and that has solid state versions with correct protection for flyback and Emi suppression measuring the pressure is not clear that it would be needed for my application as I'm actually pushing fluids of the adult kind ;-) nudge nudge