
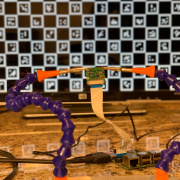
From an automated mushroom farm to the first NFT in space! Read on to find out what happened at the Jan '22 Miami Hack Week!

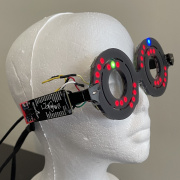
Alie highlights her crazy experience co-hosting the Arm DevSummit TV show and shares her can't miss sessions from the event.



Using the Qwiic pHAT v2.0's general purpose button to safely reboot or shutdown your Raspberry Pi with the help of a Python script.

Building a DIY personal, portable, briefcase computer workstation with a Raspberry Pi!
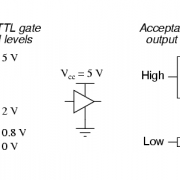
Learn what a logic level is, and how to interface between different technologies, with a few of our tutorials!



Building a set of speakers from goat skin and connecting them to a network media server

Check out this project from Creative Technologist Nick Poole using the pcDuino Camera Module.

This is a big week. We've got a great video and a bunch of new products. Come check them out.
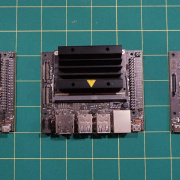
Stuff for your single board computer, LEDs, and a book for learnin'. Check out what's new this week.

Tags
Recent Blog Comments
Hmm... I'm wondering if you've thought about offering a "package" of all 5 books?
Bring back the AVC! The Sparkfun RTK EVK would really change the Autonomous Vehicle Competition. Navigation would be a snap. The competitors…
Congratulations, this history is motivational, Best regards from Queretaro Mex.
Typo alert: Uh, you have two occurances of the Shapeoko 5 Maintenance Kit, and though some of the verbiage mentions a "pack of four…
Shawn definitely made some excellent videos! Another of the folks I miss is Pete Doktor, who also made many excellent videos. I sincerely…
Watching Drew's video, I kept imagining "ultra-mouse" that would not only respond to x-y displacement and button clicks and wheel rotations,…
"heads up" -- pun intended? ;-)

Thanks for the heads up! Should be solved now. Goes back to workbench to continue work on anti-gravity machine
Uh,, unless they've managed to print a working anti-gravity machine, it sure looks to me like a couple of the photos are upside down (need…







Is this the equivalent of the GNS Electronics NTRIP-X: https://www.gns-electronics.de/product/ntrip-x-basestation-bundle/ Would I need both…