Sending a Balloon Into Near Space
An awesome high-altitude balloon project from a SparkFun customer.

We're pretty into launching stuff up into the sky. It's amazing that these days, you don't need a NASA-esque budget to send something into space (at least near-space). In the past, we've mentioned Nate's high-altitude balloon project and more recently (like, yesterday) we blogged about launching a rocket into the sky with our new ultra-small 9DoF Stick IMU. Now we have an awesome project from SparkFun customer Jonathan.

A view from near space - you can see the Cortez Sea off in the distance.
Jonathan used a number of SparkFun products to build an awesome high-altitude balloon. Namely he used the 6DoF Razor IMU and two XTend 900 Modems for communcation (plus a few other bits and pieces).
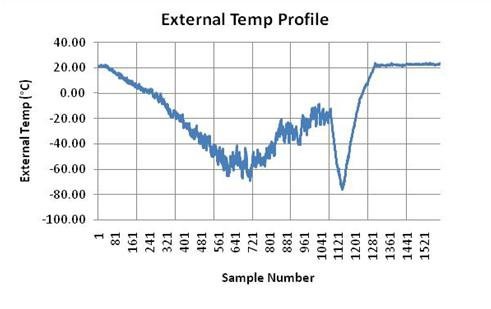
Brrr...it's cold up there!
He sent his balloon up into near-space and gathered some awesome data and pictures. Unfortunately the GPS stopped working at around 18,000 meters for some reason, but the data was impressive regardless.
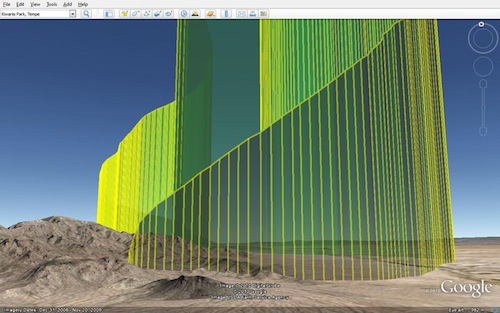
Visualizing the balloon's descent - very cool.
Jonathan did an awesome job taking his data and putting it in a great visual format (see the picture above). It's great to see more and more people venturing into high-altitude balloon projects - awesome work, Jonathan!






{kind=link}
Superb experiment ! Thanks for sharing.
Check ou this high altitude glider/ballon combination
http://www.members.shaw.ca/sonde/index.htm
Cheers,
Adrian
Update on the GPS SUP500F issue at 18,000 meter altitude. I have had correspondece with the GPS chip manufacturer and they assured me that firmware version 1.4.94 would work at over 18,000 meters as long as velocity was low. I sent them the GPS data from my flight and it appears that I found a bug in their firmware. They have sent me an update set of firmware for the module (new version is 1.4.95). I have not tried this firmware yet, so I don't want to make it public until I have checked it out. I will keep this site updated on testing progress.
and... how's the new firmware version?
Works great. I literally used it today and the GPS worked up to 102K feet(that's where the balloon popped). I emailed the new SUP500F firmware, version 1.4.95, to Sparkfun today so they can make it available to everyone. If you need it quickly(before they get around to posting it), send me an email and I will send it to you directly.
Figured it was either a bug in the firmware or a bug in the datasheet :-) The problem with testing the firmware is you either need a GPS satellite simulator or a vehicle that can take you to altitude. The latter will be cheaper until the National Helium Reserve runs out of gas (thanks to Congress directing it be privatized).
Hey YNGJDI,
Cool project.
Do you mind sharing how you were able to visualise the data in Google Earth with the vertical bars representing the altitude of the balloon? I have imported GPS data into Google Maps before but only been able to do lat and long only.
It's a configuration setting using "extrude". Go here for more information
http://code.google.com/apis/kml/documentation/kmlreference.html#linestyle
Add the following line to your KML file under the LineString configuration:
extrude>1</extrude
Be sure to put a < in front and a > at the end of the line above (copy/paste won't work on full line syntax on this web page)
You will need to add the altitude to your "coordinate" lines. A copy of one of mine is shown below where 557.6 is the altitude.
-111.3345183,33.25964167,557.6
Easiest way to visualise the data in Google Earth is to use amateur radio APRS like most HAB groups do to track payloads. APRS i-gate stations feed all APRS data to the internet and you simply need to go to http://aprs.fi/, enter the callsign assigned to your tracker to track it's position on the map on that page and then click on the Google Earth KML link to view the data in 3D using Google Earth.
If not a licensed amateur already, getting a license is quite easy or you can simply get a licensed amateur to help with your launch. And for a tracker, I doubt there's anything simplier then the RTrack-HAB that Jason at RPCElectronics mentioned earlier and will have available shortly. It's a complete tracker with a Trimble GPS made for operation above the 60K ft ITAR limit most receivers are programmed to stop operating at. (Many receivers actually stop operating at much lower altitudes, like 10-20K ft.)
So, how hard would it be to combine the rocket from the previous post with a HAB? I'm thinking about launching the rocket from the max altitude of the balloon? Either that, or at the point where the speed of ascending is starting to decline. Anyone that have done this?
Indeed, someone has - just not me:
http://www.youtube.com/user/WB8ELK#p/u/6/eFp2Gg3cyTo
Actually this sunday im launching a balloon as well (with sparkfun parts, in a sparkfun red box actually) www.hollandshoogte.nl : based on my batchPCB-PCB and a sparkfun arduino pro mini and a lassen iq i got for GPS. The reason that this guy's GPS failed above 18000 is because he chose the wrong GPS module!
I would like also some information on the HW used to suport the "Ground Segment", more specifically, the reiver used to acquire the digital signal as transmitted by the balloon.
Thanks ...
I'm interested in what kind of antenna was used. Was it a dipole or a high gain antenna? And was the downlink available the whole flught?
Do you have an estimate how high the balloon approximately got?
I would also like to know what kind of antennas were used for the XTend modems and if there was any problem maintaining a solid data connection through out the flight.
We track our HAB packages via amateur radio APRS transmissions every 30-60 sec's, but have some scientific payloads planned that we would like to receive a constant data stream from and plan to also use the same XTend modems, but it's always nice to learn and build upon what others have already done and learned rather then possibly trying things others have already found to not work.
I used a 1/4 wave omni antenna and oriented it sideways so the pattern is facing down toward the ground. I bought it from DigiKey and the part number is ANT-916-CW-RCS-ND. I used an 11 dBi yagi on the ground side and it worked great. I had good communications over the entire flight. It was an expensive solution, but it worked very well. Old saying is true....you get what you pay for.
We are using the Trimble Copernicus module in our HAB payload, the RTrak-HAB, to get past the 60K feet limitation. One of the leading HAB groups in Canada has flown our prototype payload on a few missions and so far they love it. Barry, their head hardware guy has written a very nice article about it:
http://bear.sbszoo.com/construction/traker/RTrak/RTrak-HAB.htm
We have settled on a final revision and will have these for sale very soon.
Hi Jonathan,
I have implemented the SUP500F in a project of mine. It's my first GPS module but it seems shotty to me. Somedays I'll lock on within a minute and some days I don't get a signal at all. I know there has been some posting here at sparkfun about this product but I'd like to know what your experience is with it?
Thanks,
Jesse
I am quite happy with the SUP500F....aside from the fact that it lost 3D position fix in my application above 18,000 meters. It's easy to use and at least in my experience has worked very well overall. I had no problems with performance when on the ground. Good Luck with your project.
Hi Everyone...I am Jonathan and I designed the board that flew on this balloon project. Some of you have suggested to use the SUP500F GPS Module. That is in-fact the GPS module that was used on this project. I am working now to determine why the GPS lost 3-D position fix when over 18,000 meters altitude. For more photos of the hardware, you can view a facebook album of more photos at http://www.facebook.com/album.php?aid=39875&id=100000286310645&l=e14ad252bb
I also want to include and thank my teammates (Scott, John and Eric) for their assistance with this project. It was a blast and we already have another high altitude Technical Adventure planned.
Jonathan according to the online documentation for that module ... one of its operational limits is less 18,000 meters. Bottom line ... anything over 60,000 feet forget it.
That is why I gave the model number to a GPS module that does not have that Firmware restriction on it.
Other than some of the old Motorola OnCore modules .. it is the only one that I know that doesn't have a limit at 60,000 feet.
Since we launched our balloon on the East Coast area of Virginia and we had Hurricane Danielle kicking in the Atlantic Ocean, we were tracking speeds above 90,000 feet in the range of 300+ mph. They were realistic speeds because our balloon didn't come down until it was almost 120 miles away from our launch point. We had full radio transmission of GPS data during the entire flight.
Lesson Learned - READ the entire specification sheet on something you are buying. It clearly states all of the standard limitations for the module you got.
Not true on the altitude "spec" of the SUP500F. I even contacted the manufacturer of the GPS chip. It should have worked. I will keep you posted on how the troubleshooting works out on this module.
From "GPS" on Wikipedia:
"The U.S. Government controls the export of some civilian receivers. All GPS receivers capable of functioning above 18 kilometers (11 mi) altitude and 515 metres per second (1,001 kn) are classified as munitions (weapons) that U.S. State Department export licenses are required... Disabling operation above these limits exempts the receiver from classification as a munition. Vendor interpretations differ. The rule targets operation given the combination of altitude and speed, while some receivers stop operating even when stationary. This has caused problems with some amateur radio balloon launches that regularly reach 30 kilometers (19 mi)."
Was your GPS module special in some way?
No, not special at all. The key is the difference in implementation of the 2 criteria. Are the Altitude/Speed criteria implemented with an "and" or an "or" decision. My application should have worked because I was over 18,000 meters, but I was moving less than 515 m/s.
This site has some GPSs that work above 60,000 ft:
http://showcase.netins.net/web/wallio/GPSrcvrsvs60kft.htm
It is possible to get a GPS module that works greater than 60,000 FT. We sent our balloon up during the summer and reached a transmitted altitude of 103,258 Ft. We used the ISM300F2-C5-V0004 module from Inventek. This module is rated to 135,000 Ft. I also got the Active Patch antenna to help with reception of the GPS signals.
I wish this place would make the adapter boards to use with those modules and already have them SMD soldered. I did it myself but it was a pain in the rear. The module worked great and I think it would be a wonderful add to the inventory here.
Unlike what this guy did, since were were in the Hackerspaces in Space Contest, are budget was limited to $250 or less. I would have loved to used the wireless modems that was used in this project.
I had originally started the project with an Arduino board that I got from Sparkfun but ended up building a custom circuit because I needed the serial lines to the GPS and I didn't want to mess with SoftSerial; however, it was a good start since I never messed with one before.
If you want to see what we did, you can checkout our page at http://757labs.org/wiki/Projects/hackerspacesinspace
It was our first our first try at a balloon launch and we were very pleased with what we did.
Elktronics sells that same Inventek unit on a board with a truly fabulous antenna (Sarentel active helical):
http://www.elktronics.com/
Not quite as cheap, but a very nice little package.
Just FYI.
On the instrumentation recovery...
The idea of using a steerable gliding body instead of a parachute for the instruments. Use the autopilot (http://www.sparkfun.com/products/8785) to have the package home in a particular GPS coordinate. It could make searching for the package easier than the current tracking and hoping that you can reach the last reported location.
Check out this high altitude glider/ballon combination
http://www.members.shaw.ca/sonde/index.htm
Cheers,
Adrian
I've been thinking this too. HobbyKing sells a 2.15m steerable parafoil for $24. Two servos to tug on the lines and you've got a compact steerable craft. I'd love to do this, because it seems to me the most annoying part of all this is finding your craft! Plus I'd get major nerd cred on the tubes. But someone should do it! Here is their parafoil: http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=14284
And there are videos on youtube of it working.
It would be super sweet to do that!
I've been thinking along the same lines for a while now, but you may be violating a few rules by actively guiding a payload to a target from 90k'.
Hahahaha "Violating a few rules"
It's my understanding that many civilian GPS receivers have an altitude limit of 60,000 ft, ~18 km. 60,000 ft is the upper limit of FAA-controlled airspace, so I guess somebody decided that civilian GPS receivers shouldn't have to work above that altitude. Why anyone who could build a missile that would fly above 60,000 ft would not be able to figure out how to navigate it up there is beyond my ability to feel paranoid.
Edit: Here's a GPS module from uBlox, a Swiss company, with an altitude limit of 50 km and a speed limit of 500 m/s (only works for those really slow ballistic missiles :-). It's their LEA-6 series of GPS modules:
http://www.u-blox.com/images/downloads/Product_Docs/LEA-6_DataSheet_%28GPS.G6-HW-09004%29.pdf . I'd like to see a BOB for these.
The SUP500F or the Venus 634FLPx Sparkfun sells might work--specs say altitude < 18,000m OR speed < 515 m/s. Hate to spend several hundred bucks building and launching a balloon to find out.
I used the SUP500F for this project. I'm working now to determine why it lost 3-D position fix when over 18,000 meters altitude.
you could always experiment with a receiver and do your own positioning from the raw data it spews out.
It'd be hard though
The page you really want to look at is http://www.armscontrol.org/print/2481, where we read in the list of controlled avionics equipment (In Item 11, Category II):
* Global Positioning System (GPS) or similar satellite receivers; (1) Capable of providing navigation information under the following operational conditions;
* At speeds in excess of 515 m/sec (1,000 nautical miles/hour); and
* At altitudes in excess of 18 km (60,000 feet)
Note that it only restricts the devices that can do both. I'm hoping to put one of the Venus modules to the test after Christmas break with a high-altitude balloon. I can't conceive of any way to do a test of the 515m/sec velocity restriction, though. Any ideas?
I've used the venus GPS-09133 on several flights above the 60K foot level without problems.
As several have said the limit is really max speed and max altitude but some vendors limit if either is crossed. Sirf chipsets are the most common ones to shut down at 60K feet
http://en.wikipedia.org/wiki/Global_Positioning_System#Restrictions_on_civilian_use
You are correct.
I would love to see pictures of the product and what it looked like. (Schematics etc..)
Also, I wonder what his reactions were after sending it off to space. I can just imagine him quickly running to his computer to see where it ultimately ends up..
edit: how would any of the electronics be reusable if they just fell from (almost) space?
Lot of pictures can be found at: http://www.facebook.com/album.php?aid=39875&id=100000286310645&l=e14ad252bb
My reaction was 110% pure satisfaction. I spent an awful lot of time doing the design and software and just like any effort that takes a lot of time.......it's nice to have a successful result.
All of the electronics maintain operation and I'm planning another adventure with increased objectives in the near future.
http://makezine.com/24/weatherballoons/
also: http://memetictees.com/sprawlworld/tessier-ashpool_it_dept.html
High altitude balloons carry a parachute under the balloon. When the balloon bursts, the parachute eventually opens and lets the payload down reasonably softly.
The electronics are also contained in insulating boxes that not only help retain the heat needed but also help to cushion the landing. It is absolutely routine for high altitude balloon payloads to be recovered in fine working condition.