
Hello everyone and welcome to a Friday Product Post that we've been excited for for a few months now. Today, we are pleased to announce the new SparkFun DataLogger IoT - 9DoF! This is our newest iteration of our data logger line that features an on board IMU, new plug-and-play functionality, the ability to chose between multiple IoT network platforms, and more! Not to be outdone, we also have a new metal gear motor for you to check out if you need a new type of motor for your next robotics projects. Let's take a closer look at this week's new products!
Our new DataLogger IoT is here to impress!
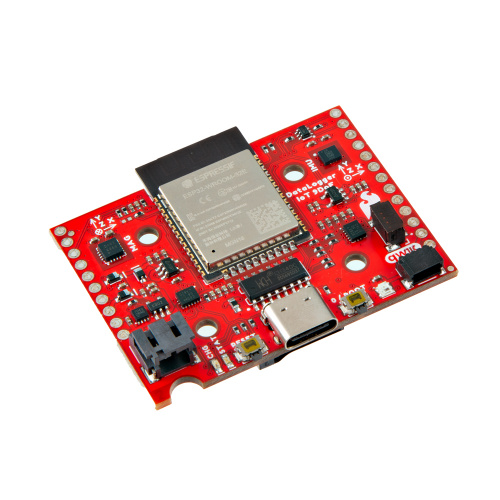
The SparkFun DataLogger IoT - 9DoF is a data logger that comes preprogrammed to automatically log IMU, GPS, and various pressure, humidity, and distance sensors. All without writing a single line of code! The DataLogger automatically detects, configures, and logs Qwiic sensors. It was specifically designed for users who just need to capture a lot of data to a CSV or JSON file and get back to their larger project. Save the data to a microSD card or send it wirelessly to your preferred Internet of Things (IoT) service!
Included on every DataLogger IoT is an IMU for built-in logging of a triple-axis accelerometer, gyro, and magnetometer. Whereas the original 9DOF Razor used the old MPU-9250, the DataLogger IoT uses the ISM330DHCX from STMicroelectronics and MMC5983MA from MEMSIC. Simply power up the DataLogger IoT, configure the board to record readings from supported devices, and begin logging! Data can be time-stamped when the time is synced to NTP, GNSS, or RTC.
The DataLogger IoT - 9DoF automatically scans, detects, configures, and logs various Qwiic sensors plugged into the board (No soldering! No programming!). Check out the product page for a full list of currently supported boards that can be auto-detected.

This gearmotor consists of a low-power, 12V brushed DC motor combined with a 9.68:1 metal spur gearbox, and it has an integrated 48 CPR quadrature encoder on the motor shaft, which provides 464.64 counts per revolution of the gearbox’s output shaft. The gearmotor is cylindrical, with a diameter just under 25mm, and the D-shaped output shaft is 4mm in diameter and extends 12.5mm from the face plate of the gearbox.
A two-channel Hall effect encoder is used to sense the rotation of a magnetic disk on a rear protrusion of the motor shaft. The quadrature encoder provides a resolution of 48 counts per revolution of the motor shaft when counting both edges of both channels. To compute the counts per revolution of the gearbox output, multiply the gear ratio by 48. The motor/encoder has six color-coded, 8in. (20cm) leads terminated by a 1×6 female header with a 0.1in. pitch.
That's it for this week. As always, we can't wait to see what you make. Shoot us a tweet @sparkfun, or let us know on Instagram, Facebook or LinkedIn. Please be safe out there, be kind to one another! We'll be back with more new products next week so make sure to check back then. Happy hacking!









{kind=link}