Launching our products!
Director of Engineering Pete Dokter plots the data from a rocket launch - and suggests a new method for testing SparkFun products!

Anything you can strap to a rocket pretty much takes
priority around here, which is to say that if someone is launching a rocket out
back, everybody is coming out to see it. Sadly, such tests are few and far
between. But if I had my way, every last product would have a ?rocket test?
before getting posted for sale. If it?s too big or bulky to get it into a small
rocket package?we need to get a bigger rocket. I don?t care if it has or has
not sensors of any kind, launch it! The higher/faster it goes, the better.
Bonus points for ?accidental? explosions. Get the idea?
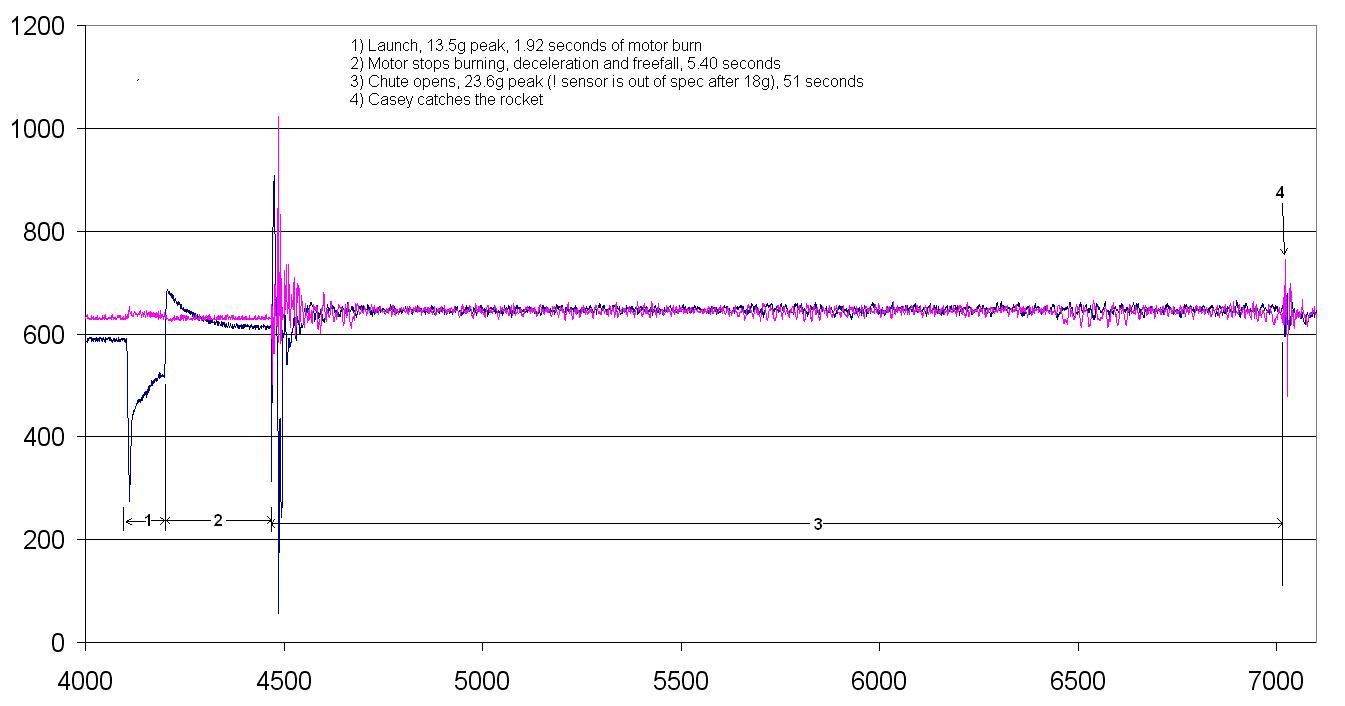
But since, for some reason, nobody around here takes rocket testing as seriously as I do, I had to come up with something that would actually justify such a test. This all started out when we started looking at hi-g accelerometers some time back. What do you do with a 500g accelerometer? Turns out that the answer isn?t ?put it in a rocket?, unless you intend to crash it into something (not impossible, I?ll grant you). And that particular accelerometer was a serious pain to talk to, being a digital interface that required current modulation of the supply line ? argh! The next choice was a 250g analog choice, the Analog Devices ADXL193. After the fact, I can tell you that this was also a bad choice when launching in a small Estes rocket. There?s just not enough force to read, certainly not hundreds of g?s worth. The best choice ended up being the ADXL321, which reads +/-18g.
Now I?ll introduce the platform:

Just to prove we launched it, here?s a video:
Here?s the plot of the data collected. The blue trace is the
vertical axis, the pink is horizontal. Click on the image for a larger version.
For those interested, a slightly more user-friendly version of the uLog will be offered for sale in the next few weeks. Check back next time when we build a trebuchet and launch a Port-o-Rotary phone!






{kind=link}
I'm working on a bit of a larger rocket (more on the scale of ones you'd find here: http://www.publicmissiles.com) and I've been thinking about designing a PCB that would combine the Arduino platform and some sensors (accelerometer, barometric altimeter and magnetic apogee sensor, etc) along with some high current FETs to drive delayed recovery charges. The idea is to create kind of a Rocketduino platform for high power rocket enthusiasts. I'm curious if anyone else at Sparkfun is into high power rocketry?
Haha, it's funny you should say that. I'm working on pretty much the same thing right now. It saves the analog readings from an altimeter, and accelerometer to an SD card. I just wish i knew how to program better, my code looks like garbage...
I'm NAR L2, an active member of WOOSH, NAR section #558, which hosted the National Sport Launch this year. I've flown several Sparkfun products, most notably a datalogger attached to that +/-18G accelerometer, in a 4" diameter rocket using I motors. I've recently been working on a way of sending altimeter data down to a ground station using 2.4 GHz XBee modules. I've flown that successfully twice on AT I245 motors.
I'd be interested in seeing your work with an Arduino-based deployment controller. There's a lot of this kind of thing that can be done.
I'd be very interested in hearing more about how well the XBee modules worked talking back to your ground station. I'd like to do a similar thing using a GPS module to report back position and altitude informaiton. I was think I'd have to use the longer range, 900 Mhz modules, such as XBee Pro 900 RPSMA, to get a reliable signal. But, if you've had decent luck with the 2.4 GHz module, I already have those on hand, so perhaps it's work a try.
Update - flew it again, this time in a dual-deployment rocket, using an I366 Redline, to 2002 feet, again with good data throughout the flight. A WAG estimate of the maximum range (altitude and distance downrange) would be about 3500 feet, and I had good data after landing.
Unfortunately the winds were too high for me to fly it also on the J500. Maybe in two weeks I'll have a chance.
I've flown the 2.4GHz XBee Pros twice now, both times to about 1600 feet (I245), with no problem communicating with the rocket. I didn't have a dual deployment altimeter bay ready for that rocket, so I haven't been able to fly it higher yet: hopefully this weekend I'll be able to put it to about 3000 feet on a J500.
I'm using the XBee Pros with the little wire antenna. Both test flights were a little off of the vertical, so I was probably receiving from roughly 2200 feet. I got the signal all the way down to the ground. I programmed my device to stop receiving after 10 consecutive readings of 0 altitude, so I don't know how reception on the ground would be (but of course you can estimate that yourself without having to fly it in a rocket).
Pete, I've got a buddy, Jon Dory, up in Ft. Collins with a big-league trebuchet. check out:
http://www.somethingfromthefarm.com/jd.wmv
for them chucking pumpkins with it. Maybe he'd let you launch your accelerometer embedded in a pumpkin with flashing lights at night. See if it could withstand the impact test. :-)
Landon
My God, that's a thing of beauty. And that, my friends, is exactly why you become an engineer. Not to get a good job and contribute blah, blah, blah... But to make bigger and better siege machines!
Although not a rocket devotee in particular, I whole heartedly agree with the first paragraph wherein it is suggested to test every product in a rocket. Yeah, man!
Side note: I visit Sparkfun early and often. Why? You dudes and dudettes rawk. "Lemme see whassup wit dem Sparkfun folk. Dey always got sumpin happnin". Totally. I pore over your catalog looking for things I "need". Keep up the great work. We love you out here.
PSmith, I am with Wayne. I want to design a board that uses and ATMega, or maybe the Arduino Mega, and either a 3 axis accelerometer and 3 axis gyro or the 9DOF Razor IMU breakout board with on board ATMega32, a barometric pressure gauge, GPS module, microSD card for data storage, USB plug to connect to a computer to download all the data, probably 3 or 4 high current FETs to fire pyros to release parachutes, etc, 4 servo ports to control fins, and maybe a pluing daughter card with a HAM radio license required telemetry system.
But it sounds like the software to load on the 9DOF Razor to due true 3D inertial nav is not out there yet, if all they have is attitude and direction software. Also, we need a very high bandwidth between the rate gyros and the servos controlling the fins to help keep the rocket stable, or at least always pointing straight up until the motor quits and the speed falls off. With just the sensors you have for sale on this website, we can already make this super-duper Rocketduino in a very small package and run off of very little battery power. I have not yet started getting high power certified, by I am looking to go L3 with hybrid rockets and go for max altitude. As soon as I finish a hundred other projects, too :)
I realise this is an old post, but anyways...
Is anyone from southern Australia flying rockets? Specifically, in the Melbourne area?
As a wannabe rocket enthusiast from 'way back, it's incredibly difficult to import motors and components. It's difficult even finding local suppliers of airframe materials! You guys in the US have no idea how lucky you are!
I achieved ~2200 feet (670+ metres) using a handmade aluminium 3" dia tube rocket (about 22 years ago). Since it's illegal to buy black powder (or any other kind of cool chemical) in Australia without a blasting licence, I made my own black powder and hand-packed it (700grams). I used a duralumin nozzle (a mate worked for Qantas as a machinist at the time), which I found the remains of about a year later...
I actually tried packing a kilo of handmade white gunpowder in an earlier 2-stage trial, but I ground it way too coarse and ended up dodging flying aluminium and (after the grassfire was finally put out with a backpack) filling in a 7-foot-wide crater. I loved that part of living in the bush - no-one gave a damn.
That's what made me want to learn engineering!
403...you do not have permission to view the image on this server.
Hello. We are from the Faculty of Science of Oporto, in Portugal, and are very interested in that work, because we are doing some experience with small children, teaching them how to do water rockets. So we have the idea to put in those rockets an accelerometer, and we saw in your project the perfect soluction. Can you tell us how does it works, and all the parts that we need to buy? Thank you!
Very Nice Project. Can be a project for Google Lunar X PRIZE.
I just recently bought a ulog. How do I actually get the data off the memory, and what does the data come out as? a txt file?
I have several builds that will pull 100gs. Will be wiling to test it for you.
I have just completed a project where I launched 2 different accelrometers a MMA2300 and ADXL78 in two diffeent rockets. A 3in dia 6ft rocket to 2900ft and 4in dia 9ft rocket to 4000 ft. Flight data and launch pics here:
http://forums.parallax.com/forums/default.aspx?f=21&m=372500
This is in preperation for the payload of a high altitude rocket. Max ltitude will be 42000 ft reaching mach 2.8.
The payload consits of 2 sections tracking and data logging. The tracking is a Lassen IQ connected to a Xtend radio. For data logging I am sampling baro, 2 axis accel, and an ADXL 78 accel. This data is all stored to SD.
The rockets airfrme is 98% complete and the motor is 100% complete. The plan was to launch this fall but this might be pushed back a little.
In the current fleet I do have a rockets capable of lifting a 1 pound payload to just under 7000 ft.
If anybody wants more info or pics send me an email mikewhorley15@yahoo.com
Can you explain more in depth how you attached the Lassen IQ to the Xtend radio? I am trying to get a Lassen iQ connected to a 9XTend. I then want to transmit this data downward from the balloon 100,000ft to a second 9XTend which is connected to a FT232rl connected to my computer's USB. From there I hope to use Trimble's monitoring program for their GPSs. I am very new to electronics, so it would be very helpful if you could go into detail about doing this. However, I understand that this takes a lot of time and would really appreciate a nudge in the right direction.
Bigger rocket
How about some ADXRS401, a MicroMag3 and an ATMega128 orbiting at 400km: https://goby.nrl.navy.mil/ANDE/Castor.html. The latest data can be read over at http://www.findu.com/cgi-bin/raw.cgi?start=120&call=kd4hbo-1.
D'oh... somehow I missed that was already on the July 17th news page. Apologies for the repeat.
Man, you guys are hard core! I'd love to be into it at that level, but every other pursuit would take a backseat. Thanks for all the input and suggestions. We'll do what we can before we release it. "Best practices"? Maybe if we knew any... Point being that there are many roads to completion, and we just know what works for us (YMMV).
We've recently taken to bungee-launching our slope combat gliders in the parking lot, so I see another sweet application for the uLog. We just got a new piece of surgical tubing that amounts to much faster launches. I wish we had it on video cuz Pete Lewis just buckled his wing about 20 minutes ago. Good stuff.
I hear ya. Writing something like that would be really boring. Probably along the lines of a college lab report..
I need to figure out how to manage information in one of my MCU's flash and whatever you guys did for the rocket would probably work for me...
Do you think you guys could put together a tutorial or "best practices" guide on how to read and write from flash? I am also curious as to how you were able to detect when connected to UART..?
AWESOME WORK!
I could really use one of these to analyse what happens to my combat bot: http://www.burntpopcorn.net/~robotvideos/2008RG/HighSpeed/00%20-%20Scissorhands.mov
It would be widen the appeal if the sample rate could be upped a bit, many people would probably trade logging time for resolution.
Sweet! I am a level 1 certified rocket geek and I have been looking for something like this! I'm pretty sure I'll need a higher G measurement though.
Links to pics of a recent launch.
http://www.facebook.com/photo.php?pid=30373771&l=1e50c7b315&id=1593160478
http://www.facebook.com/photo.php?pid=30373772&l=e2dab0b843&id=1593160478
http://www.facebook.com/photo.php?pid=30373773&l=500ff96bf3&id=1593160478
I realize that the rocket will never come close to using the full two hours of capacity, but other projects might. You could increase the capacity 60% to just over three hours by encoding your data before you store it.
Since you're storing 10-bit numbers in two bytes chunks, six out of every sixteen bits are always 0. Thats a waste of 6 Mbits over the entire chip!
You can store four 10-bit numbers in five bytes using structs and unions:
struct encoded_data {
unsigned char encoded_byte_1;
unsigned char encoded_byte_2;
unsigned char encoded_byte_3;
unsigned char encoded_byte_4;
unsigned char encoded_byte_5;
};
struct raw_data {
unsigned int reading_1:10;
unsigned int reading_2:10;
unsigned int reading_3:10;
unsigned int reading_4:10;
};
union {
struct raw_data raw;
struct encoded_data encoded;
}codec;
placing raw readings in codec.raw produces encoded bytes in codec.encoded.
placing encoded bytes in codec.encoded produces raw readings in codec.raw
Just thought I'd point out that the physical layout of bitfields may differ from compiler to compiler (or architecture to architecture), so if the data is being written on an AVR and read using a program compiled on the PC, then things might not work out the way you think (you might get lucky and have them work out).
If the encoding and decoding are both done on the same processor, it doesn't matter how the compiler maps the bits.
Acquire
Encode
Write to flash
Read from flash
Decode
Send to PC
Go check out http://altusmetrum.org ... we're flying some of your little GPS boards alongside our TeleMetrum avionics package. And if you want to see some of our stuff flying, wander down to Pueblo later this month and say hi. In fact, bring some rockets along and fly with us... ;-)
http://scronline.net/html/chili_blaster.html
to get 100 G try dropping it from the roof onto the parking lot/concrete in a metal box. I think I have measured about 10 g droping a wooden block onto a carpeted floor from about 8 feet
I have never dabbled in high powered rocketry but that seems like something sparkfun could benefit from. I'd be willing to get into it!
Pretty sure we couldn't get away with it in the parking lot. But then, we haven't been busted for anything yet. I thought we'd see things change after the fire department had to come, but nothing. Go do it, T. We need something that will pull at least 100g and still won't break somebody's windshield.
If your goal is to break 100G, you might try a rocket about the size of the one you flew here, but with a fast F or G motor in it. There's a 24mm F32 that will really move a small rocket, and probably a couple of other small faster choices.
If you try it, you're going to need space for recovery, and a lot of luck, or a tracker. You're also going to need nose weight to keep the rocket stable. Fully loaded (that is, with motor and parachute), it should balance on your finger at a point well in front of the front edge of the fins. There's more to it than that, of course, but if it fails that test, it ain't going to fly. Also use the longest delay available.
Another alternative for easily getting more acceleration is to take out that 18mm black powder motor you're using and replace it with an 18mm Aerotech D21, which you can get in a 3-pack for $18 at valuerockets.com. That one you can fly in the same rocket you already flew, and you'll get a LOT more acceleration.
You probably won't get 100G either of these ways, but you'll get much closer without spending a lot of time/money. High power doesn't necessarily mean higher acceleration - you can probably get as close with the size of rocket you're already flying.
Notice that to light these composite motors you're going to need a 12V ignition system. The little Estes box won't do it. I'm sure you guys can figure out how to deliver a lot of current quickly at 12V.
cool little board !!!! :)
if you want to test something with a trebuchet holler. We have thrown hard drives, pumpkins, milkjugs, cantalope, and lots of other things with ours.
here is a video from last fall.
http://www.youtube.com/watch?v=xR--Y95Pibo
Ahh Good times, Also we are not that far to the south of you guys...
Neg wants one! sell as an SFE widget?
--neg
oh, oh, just noticed you will be.
Epic win.
--neg
Very nice combo. Hopefully we'll see more ATtiny products in the future too.
Maybe to test the accelerometer out at 500G, you need to launch it from a railgun!
High voltage, high current, high acceleration, and sparks to boot!
What could be more fun than that?
I would like to know how the Flash is hooked up. DataFlash?
Yup, AT45DB161, specifically.
I've launched a Log-O-Matic with a three axis accelerometer, plus a 18G accelerometer for the "up" axis and three axis of gyros, and a pressure sensor (for altitude).
Here: http://reality.sgiweb.org/overby/rockets/Logomatic/index.html
it hasn't gone supersonic yet.
All I can say is.... I love your jobs guys, keep doing grate things.
Very cool! One little feature I'd love to see if there's space for it: free fall interrupt
It could be done...
Cool! In retrospect, having the interrupt delay programmable (yeah, yeah, yeah, feature creep...) up to a few seconds would make for a super-useful for water rocketry where you don't have an ejection charge to deploy your parachute. (Having it calculate the apogee time from the acceleration impulse would be gravy).
=)